
|
|
|
Главная -> Логарифмическое определение устойчивости 2п n-4l)2 2n--ifi P = -\F{x> + asin)dx==-( йф- j йф)= . = -(фз - Ф1 + Ф4- Фг). Изложенгшй принцип позволяет, во-первых, вести расчет автоколебаний по более простым уравнениям (так как выделяется только внутренняя часть системы) и, во-вторых, значительно упрощает расчет всей системы в целом, сводя его к исследованию обыкновенных линейных уравнений (но с коэффициентом / н, зависящим от автоколебаний, т. е. от параметров внутреннего контура системы). Если необходимо учесть переменные коэффициенты и нелинейности самого самолета, то уравнения системы в целом не будут уне столь простыми. Однако и в этом случае полностью сохраняет смысл предварительный отдельный расчет внутреннего контура системы, так как влияние нелинейностей самого самолета будет распространяться обьгтно только на те процессы двюкения, которые по сравнению с автоколебаниями внутреннего контура являются медленными. Известно, что и само движение самолета, например по тангажу, можно разделить на два, одно более быстрое - движение около центра тяжести (угловое движение) и другое более медленное - двшкение центра тяжести (движение по траектории). Оба они являются медленными по сравнению с автоколебаниями внутреннего контура системы управления. Однако их в свою очередь тоне моншо рассматривать отдельно. Следовательно, в этом случае, кроме обычно применяемого пространственного разбиения двинения самолета по каналам (тангана, курса, крена), расчет системы по канедому каналу (например, тангана) разбивается еще на три этапа по степени медленности двгокения во времени. Аналогичное разделение расчета по крайней мере на два этапа по степени медленности во времени бывает целесообразным и для многих других нелинейных автоматических систем регулирования, сленения, стабилизации и т. п. В сложных системах такие приемы, существенно упрощающие все исследование, оказываются единственными, которые могут сделать расчет системы практически осуществимьш. Важно иметь в виду, что при этом принципе разделения двинений сохраняется существенная нелинейная взаимосвязь между ними. § 19.3. Гармоническая линеаризация нелинейностей при несимметричных колебаниях В главе 18 гармоническая линеаризация нелинейностей выполнялась для случая симметричных колебаний в системе. Для гармонической линеаризации нелинейной функции F (ж, рос) при несимметричных колебаниях будем полагать, что входная величина ж нелинейного звена ищется в виде ж = ж -- (Z sin г];. Нелинейная функция F (ж, рх) будет в этом случае периодической функцией аргумента ф с постоянной составляющей Z . Релейная характеристика общего вида. Релейная характеристика общего вида при несимметричных колебаниях входной величины ж представлена на рис. 19.10, а. Здесь т - любое число в интервале -1 < m < 1. Определим постоянную составляющую и коэффициенты гармонической линеаризации при условии b -\- \ х . В соответствии с видом функции F {х° + а sin \\)), представленной на рис. 19.10,6, получим С учетом значений соответствующих углов тЬ-\-хО arcsin ---arcsin--h arcsin - arcsin) (19.74) при a>6 И-1 ж !. Далее для q{a, ж ) получаем 2я я-Фг 2n-i q = j F{x-j-a sin \\>) sin \pd\\) = j sin г]; di); - J sin я)? Aj; J =- . Ф1 =-(cos 1)314- cos г];2 -j- cos я13з -j- cos я1з4). 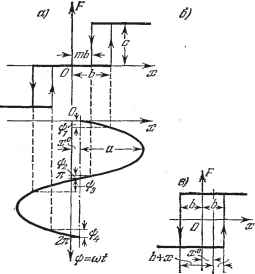 2л (fi=Mt fgarcsin arcsin Рис. 19.10. Учитывая значение углов находим + /1 /1 --fcJL] р >i,+ .. (19.75) Наконец, для g (а, ж ) будем иметь д = - f F (ж + й sin г];) cos я)? di]) = sin ~ sin + sin я)34 - sin я)зз. ла J С учетом значений соответствующих синусов получим (l-m) при (2(ж ]. (19.76) Релейная характеристика с гистерезисной петлей. Считая, что релейная характеристика с гистерезисной петлей (рис. 19.10, е) есть частный случай релейной характеристики общего вида при т = -1, получим arcsin Ъ-\-хО arcsin Ъ - хО (19.77) при а > 6 + la; !. Релейная характеристика с зоной нечувствительности. Релейную характеристику с зоной нечувствительности (рис. 19.10, г) следует рассматривать как частный случай релейной характеристики общего вида при m = 1. Тогда получим значения постоянной составляющей и коэффициентов гармонической линеаризации: arcsm ---arcsin- (Ь -жО)г j (19.78) при а >Ь-1- I ж . Идеальная релейная характеристика. Для идеальной релейной характеристики (рис. 19.6, б), полагая в последних формулах & = О, получим 2с . хО . -arcsm-, I па I (19.79) при аа:°. Релейная несимметричная характеристика. Релейная несимметричная характеристика при гармоническом изменении входной величины х со 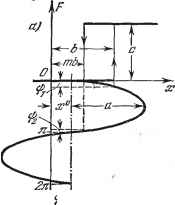 di=(at Ф-arcsin arcsin Рис. 19.11. смещенным центром колебаний представлена на рис. 19.11, а. Так будет изменяться напрянение на потребителе, управляемом поляризованным реле, если реле при срабатывании включает потребитель на полное напрянение, а при отпускании выключает.
|