
|
|
|
Главная -> Логарифмическое определение устойчивости 2) автоматические системы, которые в течение достаточно длительного ремени нужным образом изменяют (или поддерживают неизменными) какие-либо физические величины (координаты движущегося объекта, скорость движения, электрическое напряжение, частоту, температуру, давление, громкость звука и пр.) в том или ином управляемом процессе. Сюда относятся автоматические регуляторы, следящие системы, автопилоты, некоторые вычислительные устройства, некоторые измерительные приборы, системы дистанционного управления, телеуправления, самонаведения и т. п. В данной книге будут рассматриваться только автоматические системы второго класса. Эти последние делятся в свою очередь на незамкнутые и замкнутые автоматические системы. Общая структурная схема незамкнутой системы в двух вариантах атредставлена на рис. 1.1, а и б. Это - простейшие схемы управления: /полуавтоматические, когда источником воздействия является человек.
Источник воздействия Промежуточные устройства Контрольные приборы Промеоку-точные устройства Управляемый объект Рис. 1.1. и автоматические, если источником воздействия является изменение каких-либо внешних условий, в которых работает данная система (температура шлж давление окружающей среды, электрический ток, освещенность, изменение частоты и т. п.). Структурная схема, показанная на рис. 1.1, б, отличается от схемы на рис. 1.1, а тем, что кроме органов управления имеются еще контрольные приборы, которые дают возможность наблюдать за протеканием процесса в управляемом объекте. Характерным для незамкнутой системы является то, что процесс работы -системы не зависит непосредственно от результата ее воздействия на управляемый объект. Естественным дальнейшим усовершенствованием автоматической системы является замыкание ее выхода (контрольные приборы) со входом (источник воздействия) таким образом, чтобы контрольные приборы, измерив некоторые величины, характеризующие определенный процесс в управляемом объекте, сами служили бы одновременно и источником воздействия на систему, причем величина этого воздействия зависела бы от того, насколько отличаются измеренные величины на управляемом объекте от требуемых значений. Таким образом возникает замкнутая автоматическая система. В наиболее компактной форме она представлена на рис. 1.2. Более развернутая функциональная блок-схема замкнутой автоматической системы дана на рис. 1.3 и в другом варианте -7- на рис. 1.4, где замкнутый контур скомбинирован с разомкнутыми каналами. На этих схемах стрелками обозначены направления воздействий или передачи информации с одного блока системы на другой. Очевидно, что в замкнутой автоматической системе имеется полная (Взаимозависимость работы всех звеньев друг от друга. Протекание всех процессов в замкнутой системе коренным образом отличается от процессов в незамкнутой системе. Замкнутая система совершенно по другому реаги- S 1.1] ПОНЯТИЕ о ЗАМКНУТЫХ АВТОМАТИЧЕСКИХ СИСТЕМАХ рует на внешние возмущающие воздействия. Различные ценные свойства замкнутых автоматических систем делают их незаменимыми во многих случаях, когда требуется точность и быстродействие для управления, измерения или для производства математических вычислений. Поэтому при Измерение результатауправленш Внешнее \ возмущающее) воздействие \1наерузка)М)I fft) Управшемый Срегули.руемый) объект Система управления [рееулятор) Регулирующее воздействие Рис. 1.2. 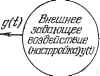 Задающее VmfiMmffff Нештешо-ирее/розо-еетешре рстроМшл телшое ршрвйстео 1/тщвто тешр шщрш1/агг
 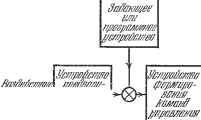 offpaffom/fi/ шформтш Мтрш-рр/рщве стро!емт
Рис. 1.4. создании всяких замкнутых автоматических систем особое значение приобретают динамические расчеты. Замкнутые автоматические системы существуют в технике в виде различных автоматических систем управления, систем автоматического регулирования, следящих систем, вычислительных систем, компенсационных систем измерения, систем автоматического пилотирования, систем стабилизации, систем самонаведения, телеуправления, автономного управления И т. п. Введем общую терминологию для следящих систем, систем регулирования И управления, изобразив общую схему в виде рис. 1.5. В следящей системе выходная величина у (t) воспроизводит изменение входной величины g (t), причем автоматическое устройство реагирует на рассогласование X (t) между выходной и входной величинами. Условимся величины у ш g называть соответственно регулируемой величиной и задающим еоздействием. Следящая система имеет обратную связь 8 выхода со входом, которая, по сути дела, служит для измерения результата действия системы. На входе- Регулируемый объект Г-лаЗная. обратная сбязь Рис. 1.5. W(p) системы производится вычитание х = h - z. Устройство, производящее это вычитание, будем называть датчиком рассогласования. Величина рассогласования X и воздействует на промежуточные устройства, а через них - на управляемый объект. Система работает так, i/ft) чтобы все время сводить к нулю рассогласо- вание X. Упрощенную схему следящей системы можно изобразить в виде рис. 1.6, где h = g т Z = у (единичная обратная связь). Рис. 1.6. Источником воздействия на задающее устройство может быть либо человек, либо специальное устройство, либо изменение внешних условий, в которых работает система. Для систем автоматического регулирования введем следующую терминологию (рис. 1.5). Агрегат 7, в котором происходит процесс, подлежащий регулированию, называется регулируемым объектом. Для краткости будем говорить просто объект. Величина у, которую необходимо в этом агрегате регулировать, т. е. поддерживать постоянной или изменять по заданной программе, называется регулируемой величиной. Автоматически действующее устройство, предназначенное для выполнения задачи регулирования, называется автоматическим регулятором (впоследствии длякраткости будем говорить просто регулятор). На рис. 1.5 он разбит на ряд звеньев. Автоматический регулятор включает в себя измерительное устройство 3,1. е. чувствительный элемент, реагирующий на отклонение регулируемой величины у. Далее ставится усилительно-преобразовательное и исполнительное устройства (звенья 4, 5, 6 на рис. 1.5, см. также рис. 1.2). Они служат для формирования регулирующего воздействия и (t) на объект, для возможно более точного выполнения задачи регулирования, при реально имеющемся возмущающем воздействии / (t).
|
||||||||||||||||||||||||||||||||||||||||