
|
|
|
Главная -> Логарифмическое определение устойчивости Задаваясь разными значениями амплитуды Oj и вьгаисляя каждый раз по формулам (18.201) - (18.203) значения q (aJ, cOj и к, получим графики flj (к) типа рис. 18.14, но уже для уточненного значения амплитуды первой гармоники периодического решения. Для заданного значения к == 140 это уточнение дает % = 2,39 е, сй = = 117,8 сек~. Значения эти достаточно близки к величинам первого приближения, а подсчитанная выше амплитуда третьей гармоники достаточно мала. Пример 2. Пусть в системе автоматического регулирования используется двухфазный индукционный двигатель, описываемый нелинейным уравнением (18.119). В примере 7 § 18.3 найдены автоколебания для первого приближения в обп];ем виде. Рассмотрим следующий числовой пример: Гд = 0,5 сек, Ti = 0,1 сек, kjk = 26,5 сек, с двумя вариантами нелинейности: а) слабая нелинейность &1 = 0,01, &2 = 0,1, bs = 0,002; б) сильная нелинейность bi = 0,1, 62 = 1, 63 = 0,166. Расчет по формулам первого приближения (18.126) и (18.128) дает авто колебания в виде х = а sin Ы, где для варианта слабой нелинейности а - 8,14, со = 6 сек~, а для варианта сильной нелинейности а = 0,834, со = 6 сек~. Вычислим теперь высшие гармоники. Для учета второй и третьей гармоник воспользуемся формулой (18.178). Для рассматриваемой в настоящем примере нелинейности F {х, рх) коэффициенты ws.2, подсчитанные по формулам (18.177), оказываются нулями. Поэтому остается только третья гармоника, для которой по формулам (18.177) для данной нелинейности с учетом обозначений (18.121) находим: гз=--Ьаа-уМ, Sg=-Тфахд. (18.204) Тогда по формулам (18.179) с учетом тото, что согласно (18.124) Q{p) = {Tgp + i){T + l)p + kik, R{pT={Tip + i)p, находим относительную амплитуду и фазу третьей гармоники: 3 У [ftift-9(7i + 73)w2p4-9w2(l-9rir3w2)2 При указанных выше данных получаем для варианта слабой нелинейности бз = 0,041, фз = -0,377, а для сильной нелинейности 63 = 0,042, Фз = -0,0384. 1) Нелинейность в данном примере характеризует степень отклонения реальной криволинейной характеристики двухфазного, индукционного йвигателя от прямолинейной После этого уточняется первая гармоника автоколебаний sin (иЬ. Для этого по формулам (18.183) находим величины добавок Ад и Ад к коэф-фщиентам гармонической линеаризации: : Ад = -д- ГзЬ1йсобз sin фд- (- + Ъа абд cos фз, 2 / 3 \ Ад= ~д-7з&1асйбзС08фз-/у&2 + М) йбзшфз- Поэтому новое характеристическое уравнение для определения уточненной первой гармоники будет тр +1) -Ь (Гз&,а1р -f Ml + hal)\ {Tip -f 1) p -f A;,/c -Ь + {4+p)iTiP + i)p0. Подставляя p = /со и выделяя вещественную и мншлую части, получим hk- [Гз (1 + &i i) + Ti (1 -ЬMl + М?)] < - {TiAq-f ) to? = О, - (l- Mi + Mn i + A9®i-2i23(l + Mi)co?-r,co?=0. Эти уравнения решаются тем же методом, что и (18.125), а именное из второго уравнения получаем 2 1 + Мч + Ьзй г + А? Г1Гз(1 + Ь1а1) + У1- а из первого A; = [Гз(+Ml) + Гl(l+Ml + ад)+(2lAg + -)]co Эти уравнения приводят также к графику % {к) вида рис. 18.23, в. Для приведенных выше числовых значений параметров системы получаем следующие уточненные значения амплитуды и частоты автоколебаний? для слабой нелинейности % = 8,03, fOi = 5,99 сек-1, для сильной нелинейности 1 = 0,820, fOi = 5,98 сек-1. Как видим, сильная нелинейность ) значительно снижает амплитуду автоколебаний (в линейной системе было бы = оо). Этот результат получался выше в решении по первому приближению и подтверждается теперь уточненным решением. § 18.6. Частотный метод определения автоколебаний Здесь, следуя Л. С. Гольдфарбу [32, 121], будем рассматривать простые нелинейности = F (ж), так как в других случаях получаются более сложные графические построения. Пусть в нелшгейной системе автоматического регулирования выделено, как обьгано, нелинейное звено (рис. 16.1). Разомкнем систему указанным на рис. 18.38, а образом, причем уравпепие пелипейпого звепа будет = F (жг), (18.205) а липейпой части системы - Q{p)Xs = R ip) Ж2. (18.206) Замыкание системы соответствует замене Жз = -(18.207) Подадим на вход нелинейного звена (рис. 18.38,а) синусоидальные колебания Xi = а sin at. (18.208) На выходе нелинейного звена получим согласно (18.205) вынужденные колебания х = F (а sin at). (18.209) которые можно найти, например, как показано на рис. 18.38, б или в. Разложим (18.209) в ряд Фурье и сохраним только основную синусоиду (первую гармонику), отбросив все высшие гармоники. Очевидно, что это
 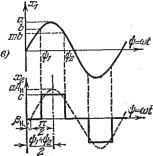 Рис. 18.38. - приближенное представление вынужденных колебаний эквивалентно гармонической линеаризации нелинейностей, рассмотренной в § 18.1. На основании этого для определения первой гармоники вынужденных колебаний величины Жд можно воспользоваться частотным аппаратом, который применялся ранее для линейных систем, следующим образом. Согласно формулам (18.9) приближенная передаточная функция нелинейного звена с уравнением х = F (ж) будет W = q (а) соответственно при наличии гистерезисной петли и при отсутствии ее. При этом выражения q (а) и q (а) определяются формулами (18.10). Приближенный комплексный коэффициент усиления, или приближенная амплитудно-фазовая характеристика нелинейного звена с уравнением Жа = = F (xj), при наличии гистерезисной петли, следовательно, будет (а) = q{a) + jq (а), (18.210)
|