
|
|
|
Главная -> Логарифмическое определение устойчивости изобрадгенная на рис. 18.21, б. Здесь возможен только автоколебательный процессе; область устойчивости равновесного состояния, имевшаяся на рис. 18.21, а, пропадает. Как видим, зона нечувствительности имеет стабилизируюш;ее значение для релейной системы автоматического регулирования, причем ширина области устойчивости (О Л kaiv) согласно (18.108) пропорциональна ширине зоны нечувствительности 26. Сравнение данного решения, учиты-ваюв];его инерционность регулятора Tg, с решением без учета показывает принципиальную важность учета этого фактора. Например, для характеристики вида рис. 18.20, в без учета получится только устойчивость {а = 0) при любых числовых значениях параметров (что нереально), а с учетом - только автоколебания (рис. 18.21, б). Для характеристики вида рис. 18.20, б вместо неограниченной области устойчивости (без учета Т) получается ограниченная и возникает еш;е область автоколебаний с большой амплитудой при одновременном существовании устойчивости в малом (рис. 18.21, а). Далее, в третьем частном случае, когда характеристика реле чисто гистерезисная (рис. 18.20, г), т. е. = -6 = -Ь, из (18.99) имеем  При этом из (18.102) находим (18.110) а из (18.103) яЬЮд(1-]-Гы)(1-]-Г§ы) (18.111) (18.112) По этим формулам построены кривые на рис. 18.21, в ж г, определяющие амплитуду и частоту периодического решения в зависимости от величины параметра к. Устойчивость периодического решения определим здесь по методу осреднения периодических коэффициентов. Для вычисления коэффициента % (а) согласно (18.60) нужно знать производную от и по X, которая, однако, обращается в бесконечность при х = Ь, когда рх>0, и при X = -Ь, когда рх <. 0. Чтобы избежать этого, заменим заданную характеристику (рис. 18.20, г) новой (рис. 18.22, а), из которой заданная получается предельным переходом (другой способ, с дельта-функцией, см. в § 18.5, рис. 18.37). Для характеристики на рис. 18.22, а при изменении величины аг по закону X = а sin at (рис. 18.22, б) производная -принимает значения, показанные на рис. 18.22, в, где Рис. 18.21. ф1 = arcsin - фа = arcsin (18.113) Осредненное ее значение (18.60) согласно рис. 18.22, е с предельным пере- ХОДОМ К заданно,!! характеристике {h -> 0) будет 2с №2-я))!) 2- №2-1) так как h = а sin фа - sin ip. Обозначив = 1 + Аф и взяв производные от числителя и знаменателя по Аф, получим X(a)=lim-п--гтт = --Д=-. (18.114) Итак, для исследования устойчивости получаем следующее характеристическое уравнение: ТТдр + {Ti + Тд)р+р + kJcX {а) = 0. (18.115) Условие устойчивости периодического ре шения, следовательно, по критерию Гурвица будет Подставив сюда ОС (а) из (18.114) и значения 4 и Л из (18.111) и (18.112), убедимся, что оно выполняется. Следовательно, в системе в) будут устойчивые автоколебания а; = sin п, амплитуда и частота которых определяются графиками рис. 18.21, в ж г или формулами J;; (18.111), (18.112). Пример 6. Пусть в той же системе характеристика реле имеет простейший вид Рис. 18.22. рис. 18.20, е, но имеется постоянное по времени запаздывание т. Тогда согласно (18.110), где 6 = 0, уравнение нелинейного звена будет В результате получим характеристическое уравнение системы {Tip + 1) {Т,р +i)p + kike--P=0. Подстановка р = ую с учетом выражения e J = cos тсо - ; sin то даст два уравнения: X = cos тсо - {Ti -Ь Тз) 0)2 = О, 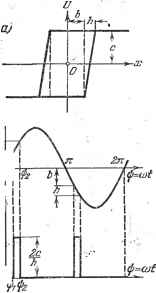 У = sin ТО) 4-О) - Г1ГзО)3 = О, из которых находим два соотношения: (ri-fr3)o) tgTO)n=l-rir30): 4cfcift On = зивп ]/1 + (Г! -Ь Г!) 0)2 + Т\ Первое из них определяет частоту (решается графически), а второе - амплитуду автоколебаний в зависимости от коэффициента усиления регулятора Л и от других параметров системы. Заметим, что во всех случаях, рассмотренных в примере 5 и в данном примере релейной системы, через Сц обозначалась амплитуда автоколебаний величины X. Амплитуда же автоколебаний се регулируемой величины 6 (температуры) бу-  6 = Пример 7. Рассмотрим систему автоматического регулирования с приводом, регу-лируюш;его органа в виде двухфазного двигателя переменного тока. Характеристика этого двигателя для разных значений управляющего напряжения U имеет вид, представленный на рис. 18.23, а. Линеаризуя характеристики, обычно считают М = си - cd) (18.116) Но это справедливо в первом приближении только для левого участка характеристики. Если же используется большая часть характеристики, то необходгшо учесть ее нелинейность. Имея в виду, что на рис. 18.23, а с увеличением (Оде коэффициент Ci уменьшается, а коэффициент увеличивается, примем для описания этой характеристики вместо (18.116) следующее нелинейное выражение: (абсолютные значения дв в коэффициентах поставлены потому, что (Ода меняет знак, а сами коэффициенты должны оставаться полонштельными числами). Аналогично можно подбирать и любой другой более подходящий нелинейный закон для описания характеристик двигателя. Введем для дальнейшего обозначение X = сйдв. (18.118) Тогда дифференциальное уравнение двигателя и - сх - С41 а; j ж 1 + сз1 (где / - момент инерции всех вращаемых двигателем масс, приведенных к валу двигателя) можно записать в виде +Jcs\x\~ + CX-{- (СаСз + С4) \х\х-{- СдС.Х = CiU. (18.119) Здесь имеем три нелинейные функции: Fx=\x\, F, = \x\x, Гармоническая пх линеаризация по правилам § 18.1 дает: F, = х. 4а dx Зл dt
|
||||||||