
|
|
|
Главная -> Логарифмическое определение устойчивости Для вычисления амплитуды автоколебаний нужно сначала по формулам (17.96) записать решения для и о, а именно: г, = с7,Л---е~М, +к,п (1--Ч: yt (Г- .). Затем по последней из формул (17.104) надо записать решение для угла рыскания самолета ф {t) и угла отклонения руля = г, что дает ==ckiT {T-t) + t- = c(t-~) (0<f<r). (17.112) По этим уравнениям можно построить графики автоколебаний самолета (рис. 17.16, б) и руля (рис. 17.16, е), причем - fcp+i / 2 Амплитуда автоколебаний руля, как видно из рис. 17.16, в, будет где с - скорость движения руля согласно характеристике рис. 17.15. Амплитуда автоколебаний самолета (по углу рыскания) Яф найдется как максимум функции ф (f) на участке О <Z t <Z Т. Взяв от ф (17.112) производную по f и приравняв ее нулю, получаем следующее уравнение для определения времени t = t, соответствующего максимуму ф: 2{kp + Ti) Л~-тр- = те 2-1, где т = Это уравнение решается графически, как показано на рис. 17.16, г. Определив таким образом величину t, подставляем ее в первую из формул (17.112), что и дает искомую амплитуду автоколебаний самолета Яф = Ф (*м)- Частота же автоколебаний определяется через полупериод Г, найденный на основании уравнения (17.105) .графически (рис. 17.16, а). Заметим, что задача в данном примере ради простоты решена лишь для упрощенного уравнения движения самолета по курсу (первое из уравнений (17.101)) и в предположении строгого постоянства скорости рулевой машинки. § 17.43 Частотный метод В. М. Попова Решение задачи об абсолютной устойчивости системы с одной однозначной нелинейностью (т. е. устойчивости при любой форме этой нелинейности со слабым ограничением типа (17.54) или типа рис. 17.14) с помощью теорем прямого метода Ляпунова было проиллюстрировано па двух примерах в § 17.2. Изложим теперь частотный метод, предложенный румынским ученым В. М. Поповым [97], при использовании которого та же задача решается более просто приемами, аналогичными частотным способам исследования устойчивости линейных систем. Если в системе автоматического регулирования имеется лишь одна однозначная нелинейность У =F (ж). (17.113) то, объединив вместе все остальные (линейные) уравнения системы, можно всегда получить общее уравнение линейной части системы (рис. 17.17, а) в виде Q{p)x = -R {р) у, (17.114) Линейная часть - Нелинейность -I  Q(j>) = аор + ар- 4- . . . + a -iP + Оп, причем будем считать т <С п Пусть нелинейность у = F (х) имеет любое очертание, не выходящее за пределы заданного угла arctg к (рис. 17.17, б), т. е. при любом X OFixXkx. (17.115) ±1усть многочлен Q (р) или, что то же, характеристическое уравнение линейной части Q (р) = О имеет все корни с отрицательными вещественными частями или же кроме них имеется еще не более двух нулевых корней. Другими словами, допускается, чтобы an = О или а = О и = О в выражении Q {р), т. е. не более двух нулевых полюсов в передаточной функции линейной части системы Приведем без доказательства формулировку теоремы В. М. Попова: для установления устойчивости нелинейной системы достаточно подобрать такое конечное действительное число h, при котором при всех со О Рис. 17.17. Re(l-b/o))PF(jo))-b>0, (17.116) где W (/(о) - амплитудно-фазовая частотная характеристика линейной части системы. При наличии одного нулевого полюса требуется еще, чтобы Im W (/(0) оо при (0-0, а при двух нулевых полюсах Re W (/(о) -> - оо при (О О, а Im (/(о) < О при малых со. и* ((0) = Re (7(0) = ReW Ца>), V* ((о) = 1ш W* (/(о) = (оГо Im W(]a), (17.117) где = 1 сек - нормирующий множитель. График W* Ою) имеет вид (рис. 17.18, а), аналогичный W (jto), когда в выражениях Q {р) ж R {р) разность степеней п - те > 1. Если же разность 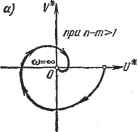
Рис. 17.18. степеней п - т ~ \, чо конец графика будет на мнимой оси ниже начала координат (рис. 17.18, б). Преобразуем левую часть неравенства (17.116): Re (1 + ]Щ W (/(О) + = Re PF (/to) -mhlmW(/со)---i. Тогда, положив W* (/со) = и* (со) + /F* (со) и использовав соотношения (17.117), получим вместо (17.116) для теоремы Б. М. Попова условие и* (О)) -У ( ) + (со)-hoV* (со)-f 1 >О при всех (О 0. Очевидно, что равенство г7*(со)-оУ* H+Y = (17.118) (17.119) представляет уравнение прямой на плоскости W* (/со). Отсюда вытекает следующая графическая интерпретация теоремы В. М. Попова: для установления устойчивости нелинейной системы достаточно подобрать такую прямую на плоскости TF* (/со), проходящую через точку I - ~, /OJ , чтобы вся кривая W* (/со) лежала справа от этой прямой. На рис. 17.19 показаны случаи выполнения теоремы. В этих случаях нелинейная система устойчива при любой форме однозначной нелинейности, ограниченной лишь условием (17.115). На рис. 17.20 показаны случаи, когда Теорема справедлива также и при наличии в знаменателе Q (р) передаточной функции линейной части не более двух чисто мнимых корней, по при этом требуются некоторые другие простые добавочные условия [2], называемые условиями предельной устойчивости. Другая формулировка той же теоремы, дающая удобную графическую интерпретацию, связана с введением видоизмененной частотной характеристики W* (/< ), которая определяется следующим образом:
|