
|
|
|
Главная -> Логарифмическое определение устойчивости ГЛАВА 17 ТОЧНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ И АВТОКОЛЕБАНИЙ § 17.1. Фазовые траектории и метод точечных преобразований Понятие о фазовом пространстве, о фазовых траекториях и их типах было уже дано выше. В данном параграфе на примерах построения фазовьпс траекторий для простейших систем второго порядка будут проиллюстрированы некоторые важные особенности процессов в нелинейных системах автоматического регулирования. Пример 1. Возьмем систему автоматического регулирования с объектом без самовыравнивания и с приводом регулируюпцего органа, имеюпщм постоянную скорость. Уравнение регулируемого объекта без самовыравнивания будет TaPf = I. . (17.1) Для регулятора без массы и демпфера с жесткой обратной связью, т. е. при бг] = -ф, о = т] - , 1=1, получим ст=-ф-1, (17.2) где ф. г], I, и о - относительные изменения регулируемой величины, смещений чувствительного элемента, регулирующего органа, элемента обратной связи и управляющего золотника (рис. 10.11, а), б - коэффициент. Привод регулирующего органа пусть имеет постоянную скорость в двух вариантах: 1) с мгновенным переключением (рис. 16.22, ж) при переходе управляющего элемента (золотника струйной трубки) через нейтральное положение (о = 0); 2) с зоной нечувствительности (рис. 16.22, з) вследствие наличия перекрытия золотника или струйной трубки. В первом случае уравнение привода регулирующего органа будет р1 = с sign о, (17.3) а во втором р1 = 0 при с<Ь, р1 = с sign а при I о I > Ь. (17.4) Возьмем фазовую плоскость (х, у), приняв а; = Ф, I/ = рф. - (17.5) Из уравнений (17.1), (17.2) и (17.5) имеем 1 = ТаУ, 0=-Х~ТаУ. (17.6) Следовательно, переключения привода в первом варианте (о = 0) будут иметь место при а: = -8ТаУ, (17.7) что соответствует прямой АВ (рис. 17.1, а) на фазовой плоскости, причем согласно (17.16) значениям о > О соответствует часть плоскости слева от прямой АВ, а о < О - справа. На основании первого из соотношений (17.6) с учетом (17.3) при о < О получаем dy с а из (17.5) откуда находим уравнения фазовых траекторий dy с (17.8) (17.9) (17.10) или, после интегрирования. Это~есть семейство парабол, показанное на рис. 17.1, а справа от линии АВ (они симметричны относительно оси х). Так как (17.8) и (17.9) являются лроекциями скорости v изображаюш;ей точки М на оси хжу,10 имеем Vy < G, 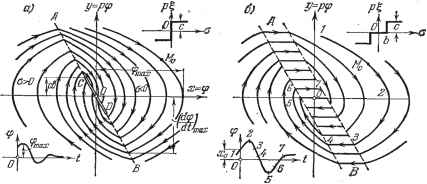 Рис. 17.1. а знак 17совпадает со знаком у.Ъ соответствии с этим на рис. 17.1, а укажем стрелочками направление движения изображающей точки М по фазовым траекториям. Аналогичным путем легко строятся параболы слева от прямой АВ. В результате, как видно из общего расположения фазовых траекторий (рис. 17.1, а), получается устойчивая система с затухающим колебательным переходным процессом. Но число колебаний будет конечным. В самом деле, здесь имеется особый отрезок CD, в который вливаются все фазовые траектории. Чтобы выявить поведение системы на этом отрезке, вспомним, что для него согласно (17.7) и (17.5) баФ + Ф = 0, . или =,С.2,е Следовательно, попав на отрезок CD, изображающая точка не может с него уйти, и система будет апериодически приближаться к установивше- муся состоянию, т. е. изображающая точка будет сползать по отрезку CD к началу координат О. Таким образом, имевший место вначале колебательный переходный процесс после конечного числа колебаний вырождается в этот так называемый скользящий процесс. Крайние точки особого отрезка CD определяются, очевидно, как точки, в которых прямая АВ касается одной из парабол соответственно правого и левого семейств. Поэтому, подставив значения из (17.7) в выражение (17.10), найдем точку С: Ус = сЬ. По найденной картине расположения фазовых траекторий можно качественно представить себе кривую переходного процесса ф (f) при любых начальных условиях. Начальными условиями определяется начальное положение изображающей точки М и тем самым - определенная фазовая траектория, иллюстрирующая протекание процесса. Она показывает (рис. 17.1, а) максимальное отклонение регулируемой величины фшах максимальную скорость (рф)п1ах такжо все последующие отклонения, число колебаний и т. п. Рассмотрим теперь ту же систему, но с учетом зоны нечувствительности. В этом случае переключениям привода (при а = -Ъ и о = -\-Ъ) на фазовой плоскости соответствуют согласно (17.6) две наклонные прямые (рис. 17.1, б): X = -ЬТаУ + ЬЬ ж х = -ЬТаУ - ЪЬ. Между этими прямыми о < fc, правее их о < -Ъ, левее их о > fc (причем Ъ > 0). При I о I < fc из (17.4), (17.6) и (17.5) получаем dy г. dx откуда (при уфО) . -=0, или ,у = Сз (прямые, параллельные оси х в полосе АВ на рис. 17.1, б). При I о I > fc получим прежние параболы. В результате снова система оказывается устойчивой и имеет колебательный переходный процесс,но вместо особой точки О получаем особый отрезок {у = О, -ЬЬ < а; < 66), т. е. установившееся состояние определяется неоднозначно. Это соответствует тому, что регулятор может находиться в равновесии в любом месте внутри зоны нечувствительности. Здесь точно так же возможен скользящий процесс, как и в случае рис. 17.1, а. В данном примере система оказывается устойчивой при любых значениях параметров и при любых начальных условиях. Однако здесь для получения системы второго порядка была проведена грубая идеализация уравнений регулятора (пренебрежение массой и демпфированием). Пример 2. Допустим, что требуется стабилизировать угловое положение некоторого тела, когда сопротивлением среды его вращению можно пренебречь. Уравнение объекта будет (17.11) где / - момент инерции тела, ф - угол поворота тела, о - его угловая скорость, М - управляющий момент со стороны исполнительного органа системы стабилизации.
|