
|
|
|
Главная -> Логарифмическое определение устойчивости соответствует картине процессов во времени, изображенной на рис. 16.3, а. Такого вида замкнутый контур, представляющий собой наиболее важный для теории регулирования тип особых линий на фазовой плоскости, называется устойчивым предельным циклом. Устойчивый предельный цикл соответствует автоколебаниям системы. Размеры предельного цикла А ш В (рис. 16.14, а) представляют амплитуды колебаний самой величины х и скорости ее изменения У = Для определения периода автоколебаний надо обратиться к решению уравнений во времени. Случаю устойчивости системы в малом и неустойчивости в большом (рис. 16.3, б) соответствует картина фазовых траекторий, изображенная на рис. 16.14, б. Граница начальных условий, до которой система устойчива, имеет чаще всего на фазовой плоскости вид неустойчивого предельного цикла, как на рис. 16.14, б, от которого в обе стороны удаляются спиралевидные фазовые траектории. Это - второй важный тип особых линий, определяющий устойчивость системы в малом и неустойчивость в большом . Заметим, что в этом случае может быть также еще более удаленный устойчивый предельный цикл (рис. 16.14, в), соответствующий автоколебаниям с большой амплитудой. Это соответствует процессам во времени, изображенным на рис. 16.3, г. Такие же принципиальные качественные изменения картины фазовых траекторий при достаточно больших отклонениях могут наблюдаться и в случаях апериодических процессов (рис. 16.12, б и 16.13, б), включая превращения их в колебательные и наоборот. Например, картине процессов во времени, иоказашю!! па рис. 16.3, е, соответствует картина фазовых траекторий на рис. 16.14, е. Аналогично для системы, находящехтея согласно линейной теории на границе устойчивости (при чисто мшшых корнях), картина фазовых траекторий, изображенная на рис. 16.8, б, может иметь место лишь вблизи состояния установившегося режима О. При больших отклонениях, если линейность характеристик звеньев системы нарушается, картина фазовых траекторий будет другой. Один из возможных вариантов изменения фазовых траекторий при больших отклонениях в этом случае показан на рис. 16.14, г. Здесь, кроме особой точки О типа центра, появляются два седла и С, что приводит фактически к неустойчивости системы. Но может иметь место и устойчивый предельный цикл. Особые линии такого типа, как САС. и САС (рис. 16.14, г), на фазовой плоскости называются сепаратрисами (третий тип особых линий). Особые линии более сложного очертания рассматриваться не будут. Здесь говорилось пока о системах, которые при малых отклонениях рассматриваются как линейные. Но совершенно аналогичная картина получается и для таких нелинейных систем автоматического регулирования, которые даже в малом нельзя рассматривать как линейные. Таковыми являются многочисленные типы релейных систем, а также системы с зоной нечувствительности, с гистерезисной петлей, с сухим трением, с зазором. Интересно отметить, что некоторые из таких систем скорее в большом , чем в малом , могут приближаться к линейньш, когда зона нечувствительности или зазор оказываются малыми по сравнению с величиной отклонений х. В системах с зоной нечувствительности и с сухим трением существуют, как известно, области застоя, когда установившемуся состоянию при данных внешних условиях (данной нагрузке) соответствует не одна точка, а целая область возможных равновесных состояний системы. На фазовой плоскости это выражается в том, что особая точка вытягивается в особый отрезок (рис. 16.14, д). Заметим, наконец, что координатами {х, у) фазовой плоскости могут служить не обязательно отклонения регулируемой величины и скорость ее, как было выше. Для этой цели могут быть взяты любые две переменные, однозначно характеризую- щие состояние системы второго порядка в произвольный момент времени. Пример. Изобразим на фазовой плоскости переходный процесс и автоколебания в системе автоматического регулирования температуры, рассмотренной выше. Координаты фазовой плоскости будут ж = е и y = (16.29) Если г/ >- О, то согласно (16.10) и рис. 16.4, а пере-Рис. 16.15. ключение регулятора проис- ходит при 6 = --& (линия EF на рис. 16.15); если же i/ < О, то при 0 = -b (линия GH). Справа от линии переключения EFGH справедливо уравнение системы (16.12), а слева - (16.13). Уравнение (16.12) в обозначениях (16.29) примет вид 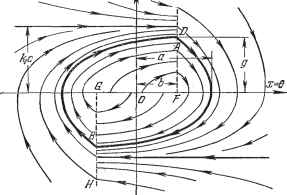 Ti+y=-hc, откуда получаем дифференциальное уравнение фазовых траекторий dy 1 kic dx Ti Tiy Интегрирование его дает X = kicTi ln\y + kic\- Тгу + Ci, (16.30) (16.31) где Ci - произвольная постоянная. Каждому конкретному значению соответствует определенная кривая на фазовой плоскости. Семейство кривых, отвечаюгцих различным значениям С, изображено на рис. 16.15 справа от линии EFGH. Эти кривые имеют асимптоту у = -кс. Направление движения изображающей точки по ним, показанное стрелками, определяется из условия г/ = , т. е. ж возрастает при г/ >- О и убывает при г/ < 0. Уравнение (16.13) в обозначениях (16.29) будет dy 1 . kjC dx Ti TiV (16.32) что дает решение а: = -kicTi 1п\у- кс { - Ту + С, согласно которому наносится семейство фазовых траекторий слева от линии EFGH (рис. 16.15). В результате получится, что фазовые траектории расходятся от начала координат п сходятся из бесконечности, т. е. имеет место случай, аналогичный рис. 16.14, а, а значит, где-то должен быть устойчивый предельный цикл. Он обозначен жирной линией на рис. 16.15. Следовательно, в данной системе автоматического регулирования будут наблюдаться устойчивые автоколебания, к которым сходится переходный процесс с обеих сторон, т. е. при любых начальных условиях. - Автоколебательный процесс является здесь единственно возможным видом установившегося процесса, а строгое поддержание постоянной температуры (6=0) невозможно. Амплитуда автоколебаний температуры в данной системе регулирования изображается на рис. 16.15 отрезком а. Период же автоколебаний определяется решением уравнений во времени, как было сделано выше. Половины АВ и BD (рис. 16.15) предельного цикла соответствуют полупериодам АВ и BD (рис. 16.4, б) автоколебаний. Отрезок g (рис. 16.15) изображает амплитуду скорости изменения температуры при автоколебаниях; это есть величина (16.18). Видно,что g < кс. Перейдем к составлению уравнений нелинейных систем автоматического регулирования. § 16.2. Уравнения систем с нелинейностью релейного типа Следуя сделанным в § 16.1 замечаниям, приведем несколько примеров составления уравнений нелинейных систем релейного типа. Система автоматического регулирования напряжения. Пусть имеется шунтовой генератор постоянного тока (регулируемый объект) с вибрацион-ньш регулятором напряжения. Упрощенная принципиальная схема такой системы показана на рис. 16.16. Когда контакты К под действием пружины П замкнуты, сопротивление, обозначенное через 2г, выключено из цепи возбуждения генератора 1. Система рассчитана так, что при этом напряжение U на клеммах генератора возрастает (при любой реально возможной нагрузке в сети, на которую работает данный генератор). В результате увеличивается ток в катушке 2 электромагнитного реле и якорь реле притягивается, размыкая тем самым контакты К. При разомкнутых же контактах К в цепь возбуждения включено сопротивление Ir. Это вызывает снижение напряжения U, а значит уменьшение тока /g и отпускание реле, в результате чего контакты К снова замьшаются, выключая тем самым сопротивление 2г из цепи возбуждения. Настройка системы на желаемое номинальное значение регулируемой величины и производится установкой сопротивления /?д. Уравнение регулируемого объекта (генератора) представим в линейном 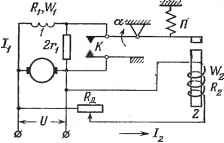 Рис. 16.16. виде: {Т -Ы) А£7 = -кАг + / (i), (16.33) где Дг - изменение сопротивления цепи возбуждения (регулирующее воздействие). Постоянная времени и коэффициент к определяются параметрами якоря и цепи возбуждения. Уравнение чувствительного элемента (катушки электромагнита 2) запишем в виде {TzP + 1) А/а = kzAU. (16.34) Начало отсчета величин отклонений А?7, А/г и Arj будет определено ниже.
|