
|
|
|
Главная -> Логарифмическое определение устойчивости РАЗДЕЛ III ОСОБЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛАВА 13 СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ § 13.1. Основные понятия Линейными системами с переменными паражтрами называются системы, движение которых описывается линейными дифференциальными уравнениями с переменными во времени коэффициентами: ao{t) .+й 1 {t)~ + an {t)x-- .+bmi(t)J + bm{t)f{t). (13.1) Коэффициенты о, . . ., a и &o, . . ., &m являются функциями времени, которые задаются либо графиками, построенными на основании эксперимента, либо аналитически. Переменные коэффициенты в уравнении системы автоматического регулирования (13.1) возникают вследствие наличия переменных коэффициентов хотя бы в одном звене системы. Так, например, у подвижного объекта (корабля, самолета, ракеты) с течением времени вследствие выгорания топлива проис- а) ходит изменение массы и моментов инерции. Если объект при своем движении меняет скорость и высоту, то возможно изменение его аэродинамических коэффициентов. Рассмотрим переходную функцию и функцию веса системы с переменными параметрами. Так как коэффициенты уравнения (13.1) меняются с течением времени, то эти функции будут зависеть от момента прило- , жения единичного скачка или единичного импульса на входе. На рис. 13.1, а изображен график изменения одного из коэффициентов уравнения (13.1) и переходная функция 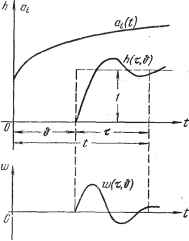 h{t - h (т, &), (13.2) Рис. 13.1. где t - текущее время, отсчитываемое от некоторого момента, соответствующего, например, включению системы регулирования или началу изменения переменных параметров; & - время, соответствующее поступлению на вход единичной ступенчатой функции; т - текущее время, отсчитываемое от момента приложения ступенчатой функции. Если теперь на вход подать единичную импульсную функцию, которую можно представить как предел отношения Ав-О ТО процесс па выходе, т. е. функцию веса, в силу принципа суперпозиции можно представить в виде разности двух смещенных на Дй переходных функций с измененным в l/Ad раз масштабом: it Щ - lim t~ ]-М*-№+А). +Д] Ав-0 Правая часть этого выражения представляет собой производную от переходной функции по аргументу &, взятую с обратным знаком. Таким образом, для функции веса получаем (рис. 13.1, б) w(t - &, #) = w(t, &)= --fe (* &, &), (13.3) Как следует из (13.3), функция веса является функцией двух неременных: времени й, соответствующего моменту поступления на вход системы единичного импульса, и текущего времени t (или т = Z - ). В связи с этим функцию веса можно изобразить в виде некоторой поверхности (рис. 13.2).  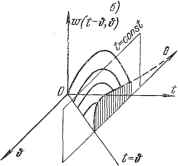 Рис. 13.2. Эта поверхность переходит в плоскость tOb при < б. Границе перехода поверхности в плоскость соответствует биссектриса t = Это обстоятельство объясняется тем, что в реальных системах реакция не может появиться ранее приложения на входе системы импульса. Поэтому нри i < & функция веса должна быть тождественно равна нулю. Сечение поверхности весовой функции вертикальной плоскостью, параллельной оси t (рис. 13.2, а), дает весовую функцию для фиксированного момента приложения единичного импульса на входе системы ( & = const). Эта функция называется нормальной весовой функцией системы с неременными параметрами: w (i - &, &), & = const. (13.4) Она является параметрической функцией, так как в нее входит фиксированный параметр Ь = const. Нормальная весовая функция монет быть сделана зависящей от аргумента т - t - & подстановкой f = & + т. В результате получаем функцию и; (т, &), & = const. (13.5) § IS.l] ОСНОВНЫЕ понятия Сечение поверхности весовой функции вертикальной плоскостью, параллельной оси &, дает кривую, образованную ординатами семейства нормальных весовых функций для фиксированного значения времени t = const (рис. 13.2, б). Эта кривая может быть получена путем обработки семейства нормальных весовых функций, построенных для различных моментов приложения единичного входного импульса & (рис. 13.3). Получающуюся зависимость будем называть сопряженной функцией веса: w{t- ,ffi w(t-&,&) w {t - Щ, t = const. (13.6) Она также является параметрической функцией, так как содержит параметр t = const. Сопряженная функция веса является функцией смещения но может быть представлена также как функция аргзтиента Q = t - & (рис. 13.2, б;, называемого реверс-смещением, поскольку 6 отсчитывается от точки & = t в сторону, противоположную смещению Это осуществляется подстановкой в сопряженную весовую функцию значения Ь = t - 6 при t = const. В результате получаем 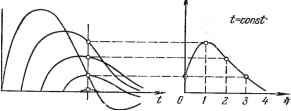 3 4 t=const Рис. 13.3. If (6, t - б), t = const. (13.7) Проиллюстрируем все сказанное примером. Пусть функция веса системы с переменными параметрами имеет вид rv{t-<}, = -. Зафиксировав смещение и положив, например, & = &о = const, получаем нормальную функцию веса: ii;(i-&o, &о) = е о± или в другом виде, при переходе к аргументу т = t - ,-ат: Ко)=- Зафиксировав текущее время И положив, например, i = = const, получаем сопряженную функцию веса Перейдя к реверс-смещению Q = t - &, имеем Заметим, что в системах с постоянными параметрами весовая функция является функцией только времени т = i - & и не зависит от момента приложения & входного импульса. Рельеф функции веса (рис. 13.2) в этом случае получается цилиндрическим, а оба рассмотренных вьппе сечения (рис. 13.2, а и б) совпадают по форме и отличаются только знаками аргументов. При
|