
|
|
|
Главная -> Логарифмическое определение устойчивости лу (12.103). При значениях М, мало отличающихся от единицы, например при М 1,3, формула (12.105) является достаточно точной и может использоваться для расчета при наличии любого числа постоянных времени, а также при наличии временного запаздывания т, которое должно учитываться Б общей сумме постоянных времени. Л. а. X. рассмотренного типа может использоваться в простейших следящих системах с невысокими требованиями в отношении статической и динамической точности. При невозможности удовлетворить требованиям технического задания приходится переходить к более сложным типам л. а. х. На рис. 12.19 изображена асимптотическая л. а. х. типа 1-2-1-2-3... Она может быть получена из соответствующей л. а. х. типа 2-1-2-3... системы с астатизмом второго порядка (рис. 12.16) добавлением одного излома при сопрягающей частоте 1 Этой л. а. X. соответствует передаточная функция разомкнутой системы (12.106) Так как обычно сопрягающая ча- Inc. 12.19. стота (i>i значительно отличается от частоты в зоне максимума требуемого запаса по фазе, то с большой степенью точности расчет можно вести по формулам, полученным в предыдущем параграфе для систем с астатизмом второго порядка. В этом случае положение л. а. X., изображенной на рис. 12.19, определяется базовой частотой 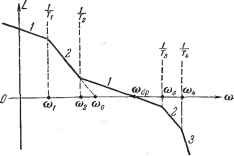 В соответствии с формулами (12.86) и (12.95) имеем М -1 1 Ул/(м-1) или в соответствии с формулами (12.88) и (12.96) 1 М т.п., .1 Tz>- Л/ + 1 Шср М-1 Шср Л?4-1 Для уточнения расчета моншо учесть то обстоятельство, что по сравнению с системой, имеющей астатизм второго порядка, здесь имеется дополнительный запас по фазе Afi = arctg(12.107) Это позволяет немного увеличить допустимую сумму постоянных времени, которым соответствуют сопрягающие частоты правее частоты среза (формулы (12.95) и (12.96)), или немного уменьшить постоянную времени (формулы (12.86) и (12.88)). Однако подобное уточнение обычно не имеет практического значения [10] и почти всегда с достаточной степенью точности можно вести расчет параметров л. а. х. типа 1-2-1-2-3... по формулам, которые были получены для системы с астатизмом второго порядка (л. а. х. типа 2-1-2-3...). Типовые л. а. х. статических систем. В простейшем случае передаточная функция разомкнутой статической системы имеет вид (12.108) где К - коэффициент усиления разомкнутой системы. Соответствуюп];ая асимптотическая л. а. х. типа О-1-2 изображена на рис. 12.20. В районе пересечения л. а. х. оси нуля децибел передаточная функция может бьсть приближенно сведена к передаточной функции системы с астатизмом первого порядка W{p)-. тде базовая частота л. а. х. (Вп = - (12.109) (12.110) Это дает возможность использовать полученную вьппе формулу (12.103) для л. а. X. типа 1-2 (рис. 12.18) при замене Kq на coq. Тогда моншо получить условие обеспечения заданного показателя колебательности KTi ума-1 Го 2 Для передаточной функции более сложного вида аналогично (12.105) имеем \ Л/Г9. I Л/Г Т / Л/7Й а (М<1,3). (у1 + у2+---) М--МУм - ! То -2 (12.111) (12.112) (12.113) Из этих формул ВИДНО значение первой большой постоянной времени чкак фактора, увеличиваюп];его запас устойчивости системы. Повьппение 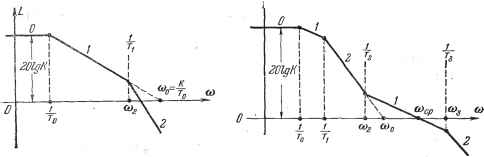 Рис. 12.20. Рис. 12.21. коэффициента усиления или повышение суммы остальных постоянных времени при заданном показателе колебательности может быть сделано нри одновременном увеличении постоянной времени Т- Отклонение передаточной функции (12.109) от более точного выражения (12.108) в области низких частот дает некоторое увеличение запаса устойчивости, т. е. уменьшение колебательности. Учет этого обстоятельства обычно нецелесообразен ввиду незначительности получаемого эффекта [10]. При повышенных требованиях по статической и динамической точности аюгут применяться л. а. х. типа 0-1-2-1-2-3... (рис. 12.21), образован- ные из л. а. х. типа 2-1-2-3... (рис. 12.13) систем с астатизмом второго порядка. iaKHM л. а. х. соответствует передаточная функция разомкнутой системы W{p)- (12.114) Как и в случае систем с астатизмом перного порядка, здесь можно с достаточной степенью точности пользоваться универсальными формулами (12.86)- (12.89) и (12.95), (12.96). Учет звеньев постоянного запаздывания и колебательных звеньев, а также введение границы малых постоянных времени может делаться аналогично изложенному выше. Переходные процессы, соответствующие типовым л. а. х. Для л. а. х. типа 2-1-2 моншо показать, что при заданной протяженности h асимптоты с единичным наклоном (рис. 12.13) выбор параметров, при котором обеспечивается минимальное значение показателя колебательности (12.83), вместе с тем соответствует некоторому оптимальному протеканию переходных процессов. При этом будет иметь место максимальное приближение кривой переходного процесса к некоторой экстремали, которая является экспонентной с постоянной времени Т = а>о%-\ Чем больше протяженность участка h, тем меньше показатель колебательности и тем более благоприятным будет протекание переходного процесса, так как постоянная времени экспоненты будет меньше. Определим вид переходного процесса при единичном входном воздействии = 1 {t) для случая использования л. а. х. типа 2-1-2 (рис. 12.13). Для нормированной передаточной функции (12.77) изображение Лапласа выходной величины будет.иметь вид
Рис. 12.22. T3g3-i-g2+T2ff-i-l q (12.115) Таблица 12.7 Параметры переходных процессов Задаваясь различными значениями показателя колебательности, можно найти относительные постоянные времени = cOoTg и = ЮоГд и затем построить переходный процесс для выходной величины Og в функции безразмерного времени Mq*. Переходные характеристики показаны на рис. 12.22. Параметры переходных процессов - перерегулирование о% и относительное время переходного процесса о*п - для i 1 - ( оО I < 0,05 приведены в табл. 12.7. Хотя эти кривые переходных процессов соответствуют л. а. х. типа 2-1-2 системы с астатизмом второго порядка (рис. 12.13), они с большой степенью точности могут использоваться для оценки переходных процессов при использовании л. а. х. других типов.
|