
|
|
|
Главная -> Логарифмическое определение устойчивости В общем случае срабатывание переключающего устройства в системе с переменной структурой может происходить от нескольких входных величин. При этом кроме основной нелинейности, возникающей за счет переключения структуры, дополнительно могут иметься какие-либо нелинейные свойства в отдельных других звеньях регулятора или объекта. § 2.4. Системы с самонастройкой программы (экстремальные системы) Раньше речь шла все время о таких системах регулирования, в которых требуемое значение регулируемой величины было заранее задано либо постоянным, либо изменяющимся по определенной программе во времени; в следящих системах оно задавалось извне во время работы системы. В отличие от них экстремальными системами регулирования называются такие, которые сами ищут наивыгоднейшую программу, т. е. то значение регулируемой величины, которое нужно в данный момент выдерживать, чтобы режим работы регулируемого объекта был наивыгоднейшим. При этом Усилтемт-првобрсзо-еателбное i/cmpoicmpo тельнёв 1/С77?ре1стве 1 i I Измери-телмое ffCTnpdomeff Регулирр- стрШШёо nai/o/fa д/гстремржа Возл/У 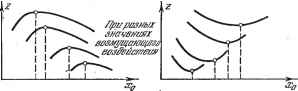 Рис. 2.11. имеется в виду уже не выбор закона регулирования, а автоматический поиск требуемого наивыгоднейшего значения регулируемой величины при изменяющихся внешних условиях работы объекта. Таким образом, на систему, называемую экстремальной, сверх обычной задачи автоматического выдерживания требуемого значения регулируемой величины, накладывается дополнительная задача автоматического поиска наивьп-однейшего значения требуемой регулируемой величины, т. е. самой программы регулирования. Следовательно, в таких системах вместо программного устройства или задатчика ставится. гстройство автоматического поиска (рис. 2.11), которое производит анализ какой-нибудь характеристики объекта 2 и подает в регулятор требуемое значение регулируемой величины так, чтобы данная характеристика z {х получила экстремальное (максимальное или минимальное) значение.
Рис. 2.12. Например, характеристика z (жо) может быть коэффициентом полезного действия регулируемого объекта (например, двигателя) или величиной расхода горючего в объекте. Тогда устройство автоматического поиска будет выдавать такое требуемое значение регулируемой величины ж (например, требуемой скорости вращения двигателя), которое дает, соответственно, максимум коэффициента полезного действия или минимум расхода горючего. При этом как сама величина экстремума z, так и соответствующее ему значение могут существенно меняться в зависимости от внешних условий работы объекта, как показано на рис. 2.11. Устройство автоматического поиска должно всегда находить этот экстремум независимо от причин, вызывающих его смещение в процессе работы объекта. В схеме на рис. 2.11 в целях наглядности функции автоматического поиска величины ж и измерения фактического значения регулируемой величины разделены. Чаще же система экстремального регулирования устраивается так, что обе эти функции объединены в одном приборе, в результате чего устройство автоматического поиска выдает не ж , а непосредственно разностный сигнал на усилитель Жд, пропорциональный отклонению фактического значения регулируемой величины от требуемого для обеспечения экстремума той или иной характеристики регулируемого объекта (рис. 2.12). Это не меняет общей сути дела. Экстремальное регулирование может применяться, например, для поддержания наивыгоднейшей скорости полета, соответствующей минимуму расхода горючего на единицу длины пути. При этом будет достигнута и максимальная дальность полета при заданном запасе горючего. Примерами экстремальных систем регулирования могут служить также: автоматическое поддержание максимальной скорости проходки скважины турбобуром при меняющихся свойствах грунта; автоматические системы управления различными производственными процессами, поддерживаюнще наивыгоднейший режим работы станков; управление энергетическими установками и системами, обеспечивающее автоматический поиск и поддержание экстремума эксплуатационных характеристик, и т. д § 2.5. Системы с самонастройкой параметров (собственно самонастраивающиеся системы) Основным, в настоящее время, видом самонастраивающихся систем регулирования и управления являются такие системы, в которых автоматически, не заданным заранее образом, изменяются какие-нибудь параметры регулятора (или системы управления), т. е. коэффициенты усиления, коэффициенты интенсивности введения производной и интеграла в закон регулирования, коэффициенты обратных связей и постоянные времени фильтров. Когда говорят о самонастраивающихся системах управления, то имеюг в виду чаще всего именно этот тип самонастраиваюнщхся систем. Но поскольку системы экстремального регулирования, рассмотренные выше, тоже, по существу, являются самонастраивающимися, то данный новый вид самонастраивающихся систем более полно называют системами с самонастройкой параметров регулятора или системами с самонастраивающимися корректирующими устройствами (имеется в виду тоже самонастройка их параметров). Рассмотрим основную идею работы этого вида самонастраиваюнщхся систем. Когда хорошо известны свойства объекта и внешние возмущающие воздействия, а система достаточно проста, можно заранее уверенно выбрать наилучшие значения параметров регулятора, чтобы добиться надлежащего качества работы проектируемой автоматической системы. Если же параметры самого объекта известны недостаточно достоверно и если к тому же они могут в процессе работы в некоторых пределах случайным образом меняться, то и параметры регулятора (системы управления) и корректирующих устройств можно подобрать лишь ориентировочно. Поскольку все качества работы автоматической системы (точность или ошибки при разных воздействиях, запас устойчивости, форма переходного процесса и т. п.) зависят от общей совокупности всех параметров объекта и регулятора, то очевидно, что в данной ситуации будет обеспечено надлежащее качество системы лишь в среднем. При этом будут происходить более или менее существенные ухудшения качества работы системы при случайных отклонениях параметров объекта в ту или другую сторону (или просто за счет недостоверности знания этих параметров при проектировании системы). Есть несколько путей решения задачи. В том случае, когда имеет место простая недостоверность знания параметров объекта, но точно известно, что в процессз работы эти параметры остаются постоянными, можно просто произвести ручную подстройку некоторых параметров регулятора в начале эксплуатации данного объекта, добившись тем самым желаемого качества работы системы. Для зтого нужно предзсмотреть в конструкции регулятора соответствующие регулировочные потенциометры, емкости, винты и т. п. для настройки величин коэффициентов усиления, коэффициентов обратных связей и т. п. В тех случаях, когда параметры объекта изменяются во времени при его работе (т. е. динамика объекта описывается уравнением с переменными коэффициентами), причем хорошо известен закон их изменения во времени, можно заранее рассчитать, по какому закону во времени нужно менять параметры регулятора, чтобы при данном изменении параметров объекта качество работы системы в целом оставалось неизменно хорошим. В данном случае нужно будет включить в систему уже не ручную, а программную настройку параметров регулятора по заданному закону во времени. В общем случае необходимо менять несколько параметров регулятора, корректирующего устройства или фильтра. Поскольку непрерывное изменение параметров не всегда удобно для конструкции, прибегают к ступенчатому изменению параметров регулятора через определенные промежутки времени, рассчитанные так, чтобы за это время качество системы не сильно ухудшалось. При этом программным устройством в определенные моменты времени будут скачком подключаться или отключаться определенные участки сопротивлений, емкостей и т. п. для соответствующего изменения параметров регулятора. Указанные пути ручной или программной настройки параметров, конечно, не приводят к самонастраивающимся системам. Они были описаны только для того, чтобы сделать более наглядным последующее изложение основ самонастройки. Вместе с тем изложенные методы программной настройки имеют и самостоятельное практическое значение и часто применяется. Во многих случаях такого рода ручной или программной настройки параметров регулятора или системы управления бывает достаточно, чтобы в среднем (с допустимыми отклонениями) получать желаемые качества работы системы в течение всего времени. Однако на практике существует много случаев, когда указанные пути неприемлемы. Во-первых, часто характер работы объекта вообще не допускает ручной настройки параметров системы управления во время эксплуатации. Во-вторых, составление программы изменения параметров регулятора часто невоз-
|
|||||||||||||||||||