
|
|
|
Главная -> Логарифмическое определение устойчивости 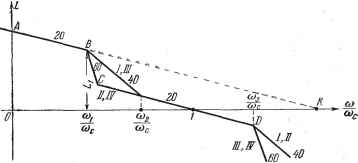 Рис. 12.10. достигается соответствующим выбором желаемой л. а. х. в высокочастотной области. Заметим, что при формировании желаемой л. а. х. можно увеличивать, если это необходимо для совпадения асимптот, запасы по модулю и 1 -I, так как такое увеличение только повысит качество системы. После формирования всей желаемой л. а. х. необходимо проверить, вьщерживается ли требуемое значение запаса по фазе, определяемое из графика на рис. 12.8, для модулей, лежащих в пределах Ll > L (ю) > Lz. (12.55) Для этой проверки необходимо подсчитать фазовый сдвиг в двух крайних точках среднечастотного участка имеющего наклон -20 дб1дек, т. е. при частотах ю = и ю = Юд. Подсчет фазового сдвига делается на основании принятой желаемой передаточной функции. Так, например, для передаточной функции типа I (см. табл. 12.6) он равен ф = -90° - arctg coTj -Ь arctg oTg - arctg oTg. Если требуемый запас по фазе не выдержан, то необходимо расширить среднечастотный участок и произвести вновь проверку. Чтобы окончательно убедиться в приемлемости сформированной л. а. х., можно по известной желаемой передаточной функции построить любым методом переходный процесс и проверить величины о% и п- Далее из ординат желаемой л. а. х. вычитаются ординаты располагаемой л. а. X. Получившаяся л. а. х. соответствует передаточной функции последовательного корректирующего звена. При необходимости это звено может быть пересчитано на эквивалентную обратную связь или эквивалентное параллельное корректирующее звено (см. главу 10). § 12.6. Синтез систем автоматического регулирования на основе частотных критериев качества Синтез систем автоматического регулирования методом логарифмических амплитудных характеристик является в настоящее время одним из самых удобных и наглядных. Наиболее трудным моментом при расчете методом логарифмических амплитудных характеристик является установление корректирующих средств. Это замечание особенно относится к низкочастотной и высокочастотной частям л. а. х. Желательно делать так, чтобы по крайней мере первая низкочастотная и последняя высокочастотная асимптоты обеих л. а. х. сливались вместе. Совпадение низкочастотных асимптот л. а. X. достигается за счет выбора соответствующего коэффициента усиления в системе К, равного требуемому. Совпадение высокочастотных асимптот связи ноказателей качества переходного процесса с параметрами желаемой л. а. X., что объясняется сравнительно сложной зависимостью между переходной характеристикой линейной системы и ее частотными свойствами. Задача построения желаемой л. а. х. значительно облегчается, если вместо оценки качества работы системы регулирования по ее переходной характеристике перейти к оценке качества непосредственно по ее частотным свойствам. Для оценки качества любой системы регулирования, в том числе и следящей системы, необходимо знать ее точность, характеризуемую опшбками в некоторых типовых режимах, быстродействие, определяемое по способности системы работать при больших скоростях и ускорениях входного воздействия или по быстроте протекания переходных процессов, и запас устойчивости, показывающий склонность системы к колебаниям. В соответствии с этим можно говорить о критериях точности, критериях быстродействия и критериях запаса устойчивости. При использовании частотных критериев необходимо основываться на тех или иных частотных свойствах системы регулирования. При оценке точности по ошибкам при воспроизведении гармонического входного воздействия одновременно можно оценить и быстродействие по частоте этого воздействия. Тогда критерий точности и критерий быстродействия сливаются в один критерий динамической точности системы регулирования. Ниже будут рассмотрены методы расчета систем регулирования, основанные на использовании частотных критериев качества. При этом кривая переходного процесса может, вообще говоря, не рассматриваться и не использоваться. Однако в целях иллюстрации будут даны универсальные нормированные кривые переходных процессов при единичном входном воздействии для рассматриваемых типовых л. а. х. . В дальнейшем изложении будут, как и ранее, рассматриваться линей-щые системы, состоящие из минимально-фазовых звеньев. Под опшбкой следящей системы будет пониматься не действительное рассогласование между задающей и исполнительной осями, а только сигнал рассогласования, выявляемый чувствительным элементом системы. Это вызвано тем обстоятельством, что собственные ошибки чувствительных элементов, несмотря на их большой удельный вес в полной ошибке системы регулирования, не оказывают влияния на статический и динамический расчет последней и должны учитываться отдельно. Вопросы расчета опшбок чувствительных элементов относятся к сфере теории соответствуюшрх устройств (сельсинов,вращающихсятрансформаторов,потенциометров ит.п.). Методика расчета излагается, в основном, применительно к следящим системам воспроизведения угла и воспроизведения скорости. Однако эта м1етодика применима и для других систем автоматического регулирования. Требования к низкочастотной части желаемой л. а. х., связанные с необходимой точностью. На основании требования по точности формируется низкочастотная часть желаемой л. а. х. следящей системы. Рассмотрим вначале астатические системы. Наиболее просто оценить точность следящей системы можно по воспроизведению гармонического входного сигнала с амплитудой 0imax и частотой (йк- 1 = ипах sin COkL (12.56) Амплитуда ошибки может быть найдена с помощью модуля передаточной функции по ошибке: шах=1Фо(7СОк)Чгпах= + > (12-57) (12.58; Последнее выражение позволяет jferKo сформулировать требование к низкочастотной части л. а. х. следящей системы. Для того чтобы входное воздействие (12.56) воспроизводилось с ошибкой, не превышающей flmaxr л. а. X. системы должна проходить не ниже контрольной точки с координатами = к, L((OH) = 201gW(/ ) = 201gAs . (12.59) Umax Часто при определении условий работы следящей системы оговариваются только максимальная скорость йтах и максимальное ускорение Ejmax слежения. В этом случае можно подобрать эквивалентные режимы гармонического входного воздействия. Вначале найдем такой режим (12.56), при котором амплитуда скорости и амплитуда ускорения равны максимальньш заданным значениям. Очевидно, что этому режиму соответствуют: 1 max - 1 max 1 max Рис. 12.11. 6i max j< По этим величинам можно построить контрольную точку (рис. 12.11) в соответствии с (12.59). Будем теперь рассматривать режим гармонического входного воздействия, в котором амплитуда скорости по-прежнему равна максимальному значению, а амплитуда ускорения меньше максимального. Тогда контрольная частота (12.60) будет пропорционально уменьшаться, а амплитуда (12.61) возрастать обратно пропорционально амплитуде ускорения. При этом контрольная точка будет перемещаться влево по прямой, имеющей наклон 20 дб/дек. Б предельном случае, если принять амплитуду ускорения равной нулю, контрольная частота к 0. Это соответствует режиму вращения с постоянной скоростью fi = fix max- Тогда формула (12.58) вырождается в известное соотношение Wx = %, (12.62) где Kq - - предельное значение добротности по скорости следящей системы с астатизмом первого порядка, ниже которого нельзя иметь реальную добротность по скорости, исходя из условий точности. Если теперь рассматривать режим гармонического входного воздействия с амплитудой ускорения, равной максимальному значению Етах амплитудой скорости, меньшей максимального значения fiimax, то аналогичными рассуждениями можно показать, что контрольная точка А (рис. 12.11) будет двигаться вправо по прямой, имеющей наклон 40 дб/дек. Квадрат частоты точки пересечения этой прямой с осью нуля децибел равен предельной добротности следящей системы с астатизмом второго порядка где W (усок) - частотная передаточная функция разомкнутой системы. Так как в подавляющем большинстве случаев амплитуда ошибки значительно меньше амплитуды входного сигнала, т. е. flmax Olmaxi то справедливо соотношение W Цы,) Э> 1. Поэтому вместо (12.57) можно пользоваться приближенным. выражением
|