
|
|
|
Главная -> Измерение мощности СВЧ Приложение 1 ОПРЕДЕЛЕНИЕ ПОГРЕШНОСТИ РАССОГЛАСОВАНИЯ ПРИ ИЗМЕРЕНИИ ПРОХОДЯЩЕЙ МОЩНОСТИ С ПОМОЩЬЮ ВАТТМЕТРА С ПОГЛОЩАЮЩЕЙ СТЕНКОЙ Обычно ваттметры с поглощающей стенкой калибруют на одной или нескольких частотах рабочего диапазона. Для калибровки применяют образцовые средства, являющиеся эквивалентом согласованной нагрузки. При калибровке находят коэффициент зондового устройства Nkb, определяемый отношением Лкв = согл/Яо. где Рсогл - мощность, проходящая в согласованную нагрузку; Ро - мощность, рассеиваемая в поглощающем отрезке ваттметра проходящей мощности при согласованной нагрузке. I Ваттметр (СВЧ) П < поглощанщей - у стен/гай г ИагруЗка -B-CZD - 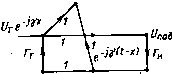 Рис. П.1. Упрощенный граф электрической схемы измерения проходящей мощ-и >сти методом поглощающей стенки. Если при измерении мощности, проходящей в данную нагрузку, учитывать этот коэффициент, то погрешность рассогласования составит Vcc=(W b/Ph)-1. {П.1) где р - мощность, поглощенная в ваттметре проходящей мощности при данной нагрузке; Рн - мощность, проходящая в данную нагрузку. Пользуясь основными уравнениями длинных линий и допуская, что сопротивление участка линии с потерями является активным, а потери в линии малы по сравнению с мощностью, проходящей в нагрузку, можно выразить мощность, рассеиваемую в поглощающем отрезке ваттметра проходящей мощности, мощность, проходящую в данную нагрузку, и калибровочный коэффициент (рис. П. 1) как P={\Unaji\yZon)R , sin Y (Хо-Jti) 1 +1 Гн P+21 Г I cos [2yl-y (Xi+x)-if] Я =1/падР{1-Г Р)/гол. i/nan=t/r/(l-frr e-J2v); (П.2) (П.З) (П.4) Ur - напряжение генератора, пересчитанное в плоскость начала отрезка линии с потерями; Гг, Гн - комплексные коэффициенты отражения генератора и нагрузки; Гн = I Г I е* ; Y = 2лД; 2ол - волновое сопротивление линии передачи; R - сопротивление поглощающего участка, Ха - Xi - длина поглощающего участка. 148 Подставив (П.2)-(П.4) в (П.1), получим врасс - 1 +1 Гн Il-f 2 Гн I cos [2у1-у (jei+jta)-<p] sin v(a:2-лгх) у (X2-Xi) 1-Г Если при калибровке и измерениях выполняется условие Xi-А1 = пЯ.кал/2, -1. (П.5) где п - 1, 2, 3, ...; Я. ал - Длина волны, на которой калибруют прибор, то sin у {х2 - Xi) обращается в нуль и выражение (П.5) упрощается: расс=2Гн=/(1-1ГнП. (П.6) Из выражения (П.6) следует, что при длине поглощающего элемента, кратной значению А ал/2, погрешность, обусловленная рассогласованием, не зависит от места расположения поглощающего элемента относительно нагрузки и фазы коэффициента отражения нагрузки (р. . Так как погрешность в этом случае только положительна, ее можно учесть, если известно значение модуля коэффициента отражения. Для этого результат измерения следует умножить на коэффициент (П.7) Максимальное значение погрешности, обусловленной рассогласованием, получается при условии - < Я., т. е. при 2у[ - у {xi -f лга) - Ф = 0; пл {п = 1, 2, 3 ...). В этом случае брасс макс-Ь = 2Гн 1/(1-Гн,), брасс макс-=-2 Гн /(l-fIT ). (П.8) Погрешности в полосе частот. Рассмотрим, какие погрешности следует ожидать в случае работы ваттметра в относительной полосе частот ±&а и его калибровке на средней длине волны, учитывая при этом соотношение между длиной волны в передающем тракте и свободном пространстве. А. Для приборов с коаксиальным трактом. Пользуясь соотношениями /MaKc = fcp(l+An). /мин=/ср(1-An). TsraH=cp/(l--An). макс = р/(1-An). (П.9) можно показать, что максимальное значение погрешности в полосе частот Ад будет находиться в пределах f. 21 Гн 1 ± 21 Гн I sin я (1-Ад)/л (1-Ад) Орасс макс - I-IThI 21 Гн 1 ± 2 I Гн 1 sin я (1+Ап)/л (1 +Ап) 1-Гн1= (П. 10) Если ввести поправку к показаниям прибора на средней частоте, то максимальная дополнительная погрешность, обусловленная рассогласованием, составит брасс макс 21 Гн I sin я (1 - Ад)/я (1-Ад) 1-ГнР 2ГнИ!пя(1+Ап)/я (1 +Ап) 1-Г а (П.11) Согласно (П. 10) и (П.11) большие погрешности соответствуют длиииовол-иовому участку диапазона. Б. Для приборов с волноводным трактом. Так как длина волны в волноводе Яв отличается от длины волны в свободном пространстве X, то для упрощения решения уравнения (П.5) воспользуемся соотношением \ Лв макс в мин / (П. 12) Из (П. 12) получаем в макс - макс/ - (макс/р) в мин = Ямин/l/l -(мин/кр)*- (П. 13) в макс=Яв ср 1 -Ь 9)/2, в MHH=Scp{+V)/29. где 9 = Я.В макс/в мин Если Х2 - Xi= Я.В cpi то максимальное значение погрешности в полосе частот ±Дп будет находиться в пределах Орассмакс- 1 Гнг 2r 2±2rHl(sin--)/- I 1 + Я !i LbL . (П.14) 1-1 ГнР При введении поправки на средней длине волны максимальная погрешность, обусловленная рассогласованием, составит 2я 1+Я расе ыакс 1-ГнР 1-Г (П. 15) Согласно (П.14) н (П. 15) большие погрешности соответствуют длинноволновому участку диапазона. Приложение 2 ОПРЕДЕЛЕНИЕ ПОГРЕШНОСТИ РАССОГЛАСОВАНИЯ ПРИ ИЗМЕРЕНИИ ПРОХОДЯЩЕЙ МОЩНОСТИ ЗОНДОВЫМИ УСТРОЙСТВАМИ . Методика определения погрешности аналогична изложенной в приложении 1. Одиозондовые устройства. На графе электрической схемы одиозондового устройства (рис. П.2) Ur - напряжение генератора, пересчитанное в плоскость зонда (плоскость поперечного сечения линии передачи в месте расположении зонда); t/пад - напряжение падающей волны; Гг - коэффициент отражения генератора, пересчитанный в плоскость зонда; а.л - матричные коэффициенты. Упростим граф, положив, что связь зондов с линией передачи мала (Ям х О Оа* ~ 0) и коэффициенты отражения аг также пренебрежимо малы. На уп- рощенном графе (рис. П.З) Ди-общий коэффициент, учитывающий связь зонда с падающей волной и коэффициент детектирования; вза - общий коэффициент, учитывающий связь зонда с отраженной волной и коэффициент детектирования. Если детектор на выходе зонда квадратичен, то напряжение на нагрузке детектора будет t/ l = где £/пад = £>г/(1-ГгГн). 1-ГгГ, Нагрузка Гг Гп 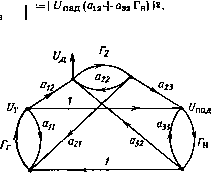 (П. 16) Рис. П.2. Граф электрической схемы измерения проходящей мощности зондовым методом. Так как зонд не является направленным элементом, то /д1 = а!2/падР1+Гн2. Мощность СВЧ, рассеиваемая в нагрузке, равна Рн=1/пад2(1-Г 1г)/гол. (П. 17) Из (П. 16) следует, что при согласованной нагрузке напряжение на нагрузке детектора будет t/до 1 = аЬ1 Р Ur/ 1 \ 1/пад и мощность, рассеиваемая в согласованной нагрузке, - -~-- составит Рсогл = \Ус\Уго . (П. 18) Калибровочный коэффициент, учитывающий соотношение между мощностью f согл и i/до, численно равен значению коэффициента преобразования:
Лн з=Рсогл/1 до I = l/ai2 Zon- (П. 19) Рис. П.З. Упрощенный граф однозондовой системы. Пользуясь калибровочным коэффициентом при измерении мощности, рассеиваемой в данной нагрузке, допускаем погрешность рассогласования, равную врасс = (РБ/Рн)-1. Рв=/дЛ з. Подставив в (П.20) значения t/д, iV з и Р , получим 6расс = [1 1+Г 2/(1-Гн)]-1. Так как Гн=Гн1еЧ то брасс = (21 Гн -Ь 21 Гн Icos ф)/(1 -1 Г 12). (П.20) (П.21) Максимальная погрешность рассогласования получается при р = 0; пп (л = 1, 2, 3 ...) и составляет брасс макс+-=2Г /(1-1Г 1), Space макс-=-2 Г 1/(1+Г ). (П.23) В табл. П.1 приведены значения максимальных погрешностей при различных Гн- Двухзондовые устройства. Рассмотрим погрешность рассогласования двухзондовой системы, когда зонды отстоят друг от друга на расстоянии jt и их выходные сигналы суммируются. Таблицэ П.1 Л измеритепь-I ному блону
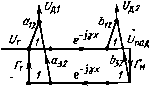 Рис. п.4. Упрощенный граф системы из двух зондов. Полагаем, что связь зондов с линией одинакова и квадратичные характеристики-детекторов идентичны. При квадратичном детектировании сумма сигналов на нагрузках детекторов (рис. П.4) I и. 1 (11 -f Гн e-iv-p-f I е-У-+Гн e-i-1) \и\ + \Уш\- , rrr e-i2vP Обозначим 1/пад=1/г/(1-Г;Гне-12У). (П.25) Тогда I t/fli I -f I {Уда I = а \Vnan 14Т+ 21 Г cos (2yx-te) +1 Г 2-}--f 1 + 2 I Г I cos ф-f I Г 2] = 2сЬ I пап 141 +1 Г 2+2 I Г I cos (ух-(р) cos ya:] Мощность, проходящая в нагрузку, равна Рн={/пад1М1-Г 12)/гол. (П.26) Мощность, измеренная прибором, составляет PB = {\Upx\ + \fJn2\)Ns. (П.27) Af з = Рсогл/(1 {/дю l-f I {/д2о)= 1/2сЬ 2ол (П.28) - калибровочный коэффициент зондового устройства, определяемый экспериментально при согласованной нагрузке, Рссгл определяется согласно (П. 18). Погрешность рассогласования при измерении проходящей мощности составит 6расс = [21 Г 12 +2Г I cos (ух-(р) cos VJ=]/(1 - Гн Р). (П.29) Согласно (П.29) при х = Я.в/4 погрешность не зависит от места расположения зондов в линии и фазы коэффициента отражения нагрузки ф н равна брасс = 2Г 2/(1-Г 2). (П.ЗО) Если X К то предельные значения погрешности, как и при одном зонде, будут брассмакс+=±21Г 1/(1 =F Г 1). (П.31) Погрешность в полосе частот. Рассмотрим погрешность в некоторой полосе частот rtAn при калибровке зондов на средней длине волны, учитывая соотношение между длиной волны в передающем тракте и свободном пространстве. А. Для коаксиальных устройств. Пользуясь соотношением (П.9),можно записать 2 Гн 2-Ь2 Гн I cos [я (1 + Ап)/21 cos ([я (1±Ад)/21-ф} Voc- 1-Гн2 Приравняв производную числителя нулю, находим, что максимальная погрешность будет при Ф = я (1 ± Ап)/2 + ля (л = О, 1; 2. 3, ...). Тогда 2rH2±2rHcos [я(1± Ап)/2] (11.dd) расе макс - 1-Г 2 Чтобы уменьшить погрешность рассогласования, можно ввести поправку на средней длине волны (поправочный множитель) Пл = (1-Гнт1+ГнР). В этом случае макскмальная погрешность рассогласования в полосе частот будет 2rHcos [я(1±Ап)/21 1-Гн12 Таблица П.2 брасс макс = ± (П. 34)
брасс - (1+1 г, Максимальные значения погрешности рассогласования в полосе частот с учетом поправки для средней частоты даны в табл. П.2. Если в двухзондовой системе связь зондов с линией передачи различна и характеристики детекторов неидентичны, что всегда имеет место, то выражение для погрешности рассогласования примет следующий вид: +2Гн cos {2ух-ф)- COS ф (1-Гн2)(1--Ь?2о/г!2о) - 1, (П. 35) где ci2. 6ia - коэффициенты, характеризующие связь зондов и параметры детекторов на данной частоте; аао. 6120 - коэффициенты, характеризующие связь зондов и параметры детекторов на частоте калибровки. Чтобы исключить зависимость погрешности рассогласования от коэффициентов связи хотя бы на средней частоте (частоте калибровки), коэффициенты а я b выравнивают, изменяя глубину погружения зонда или чувствительность выходного устройства. При измерении на средней частоте, когда а,а = ciao = 612 = fciao. погрешность определяется выражением, аналогичным (П.29): 21 Гн 2+2 Гн I COS (ух-д,) cos ух -Гн2 (П.36) В диапазоне частот выравнивать сигналы на выходе зондов практически невозможно, поэтому иногда прибегают к умножению сигналов с выходов зондов.
|
||||||||||||||||||||||||||||||||||||||||||