
|
|
|
Главная -> Регулировка антенн 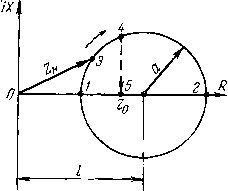 Рис. 1.2 Пересекает ось в точках 1 и 2 (см. рис. 1.2). Это означает, что выбором длины фидера можно всегда сделать входное сопротивление чисто активным и соответственно равны.м R\-ZqK (в точке /) и RzZqIK ( в точке 2). Для перехода из точ-ки / в точку 2 нужно увеличить длину линии на четверть волны. Дальнейшее удлинение линии на четверть волны обусловливает переход из точ- -ки 2 в точку / по нижней полуокружности фиксированного К. Если еа комплексной плоскости \XR, помимо семейства о.кружности фиксированных значений К, нанести кривую входного сопротивления реальной антенны, то расположение кривой Za внутри окружности минимального кбв /(мин будет означать, что при работе в диапазоне частот кбв в линии данного волнового сопротивления нигде не будет меньше Кшт- Следовательно, задача согласования данной нагрузки с волновым сопротивлением сводится к такой трансформа.ции кривой Za, чтобы она полностью была размещена внутри окружности заданного К. На рис. 1.3(2 сплошными линиями построено семейство окружностей фиксированных юбв для Zo = 75 ом, а пунктирными - для Zo=150 ом. На этом же рисунке нанесена кривая входного сопротивления /-2-3-4. Для фидера с Zo = 7i5 ом кбв по диапазону частот изменяется от 0,535 для точки / до 0,25 для точки 4 (см. ход сплошных окружностей, равных кбв); для фидера с Zo = = 150ojW - в пределах 0,9-0,5 (см. ход пунктирных окружностей, фиксировзнных кбв). Если в первоМ случае согласование нагрузки с фидером, в рассматриваемом диапазоне частот нельзя считать высоким и требуются меры по его улучшению почти всюду, за исключением начального участка, то применение фидера с Zo=150 ом уже обеспечивает удовлетворИтельное согласование с нагрузкой без применения каких-либо специальных мер. Очевидно, что для любой нагрузки с известны.м частотным ходом можно подобрать фидер с волновым со- I. ом 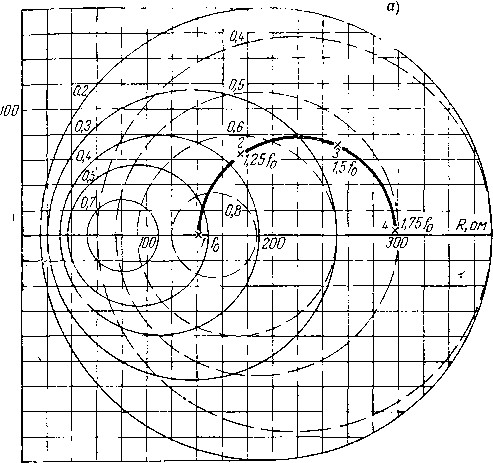 УК=0,25, Zg = 750M -\ 50 К=ОЛ 2о = 75ом\ -50 -100 I 50\ WD.. 150 Rf, \j.3fo- -Ш--У -  О -50 -100 TTlot \ 50[.JD0 150 RP\ КЩ71, 2o=75ort Рис. 1.3 .противлением Zoom, при котором обеспеч-ивался бы наилучший из возможных режим работы во всех точках рабочего диапазона частот. Для одной точки (иа одной из частот) можно подобрать длину фидера и его Zq так, чтобы получить любое произвольное наперед заданное значение Zex- Для определения Zoom вокруг зависимости входных сопротивлений очерчивают окружность минимального радиуса. Проектируют окружность на ось R и замечают конечные точки проекции У?мин и Ям&кс- Тогда иско.мое волновое сопротивление определится как 0 опт - ( Для нашего примера /?ыин=140 ом, /?макс = 300 ом и Zo опт = 205 ом. Действительно, в фидере с BOvTHOBbiM сопротивлением 205 ом кбв во всех точках от первой до четвертой будет не хуже /(=140/205 = 205/300;0,68. Далеко не всегда частотный ход входных сопротивлений антенн и.меет такой благоприятный для согласования с фидеро.м вид, какой был взят для при.мера. Однако путь улучшения согласования за счет выбора волнового сопротивления линии передачи возможен лишь в тех случаях, когда фидер будет изготовляться собственными силами (см. приложение 1), что практически возможно лишь на коротких волнах, где вполне допустимо применение открытых симметричных линий. При применении коаксиальных кабелей, а также при использовании приемной и передающей аппаратуры, рассчитанной на работу с фидерами, имеющими определенные значения волновых сопротивлений (с целью сведения к минимуму потерь энергии из-за рассогласования), необходимо принимать более сложные меры по согласованию Za и Zq. Простейшие методы согласования питающих линий с нагрузками можно подразделить на две группы по способу включения в линию согласующих элементов - параллельно или последовательно - в определенном сечении линии. К согласуюши.м устройствам первой группы относятся реактивные шунты. Вторую группу составляют трансформаторы, которые, как правило, представляют собой отрезки длинных линий оо специально подобранными! волновыми сопротивлениями. Очень час-
|