
|
|
|
Главная -> Разомкнутые системы радиоавтоматики выполнено, так как среднеквадратичная ошибка только от возмущающего воздействия превысит допустимую величину среднеквадратичной суммарной ошибки. Объединяя запретные области для ЛАХ, построенные при учете динамической ошибки на рис. 8г6 и при-учете ошибки от возмущающего воздействия на рис. 8.7, получим результирующую область, ко- Запретная абпать 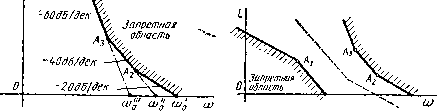 Рис. 8.7 Рис. 8.8 торая показана на рис. 8.8. Далее синтез, обеспечивающий требуемую точность робастной системы, сводится к выбору ЛАХ, проходящей на некотором расстоянии от левой и правой запретных областей и удовлетворяющей обычным требованиям по запасу устойчивости замкнутой системы. В качестве примера одна из приемлемых ЛАХ показана на рис. 8.8 пунктирной линией. Заметим, что если левая и правая запретные области накладываются одна на другую, то получение требуемой точности в робастной системе невозможно. Строго говоря, оно невозможно даже при касании этих запретных областей, так как в этом случае среднеквадратичная суммарная ошибка, каждая из двух составляющих которой сможет достигать величины а°, составит l/2a°. Легко показать [3], что для гарантированного получения требуемой точности должен быть некоторый интервал между левой и правой запретными областями, минимальная ширина которого по горизонтали составляет около четверти декады. § 3.2. КОМПЛЕКСИРОВАНИЕ РАДИОТЕХНИЧЕСКИХ ИЗМЕРИТЕЛЕЙ С ДАТЧИКАМИ ДРУГИХ ТИПОВ Понятие о комплексировании. Под комплексированием в измерительных системах понимают совместное использование двух или нескольких независимых источников информации для повышения точности и помехоустойчивости измерений. Если измерительная система построена на базе следящего радиотехнического измерителя, дополненного каким-либо нерадиотехническим датчиком или датчиками (инерциальным, гироскопическим, аэродинамическим, барометрическим и др.), она называется комплексной системой радиоавтоматики [14]. Наиболее широкое распространение комплексные системы получили при решении навигационных задач, т. е. при измерении координат и параметров движения объектов. Например, скорость самолета может измеряться доплеровским измерителем скорости и угла сноса (ДИСС), а также путем интегрирования показаний акселерометра, измеряющего ускорение. Для измерения высоты целесообразно использовать радиолокационный и барометрический высотомеры. Для измерения углов крена и тангажа могут служить радиовертикаль и гироскопический датчик углов - гировертикаль. Ряд подобных примеров легко продолжить. FziP) Рис. 8.9 Рис. 8.10 Обобщенная функциональная схема комплексной измерительной системы показана на рис. 8.9, где Дх, Дг, , Дп- разнотипные датчики, на основе выходных сигналов которых Xi{t), хЦ)..... л: (0 вычислитель вырабатывает оценку g{t) измеряемой величины g{t). Смысл комплексирования состоит в выработке оценки g(f) с точностью, превышающей достижимую при раздельном использовании датчиков. Требуемый для этого алгоритм работы вычислителя зависит от многих факторов и может описываться дифференциально-разностным уравнением достаточно общего вида. В частном случае, когда вычислитель и датчики представимы непрерывными линейными динамическими звеньями с постоянными параметрами, справедлива эквивалентная структурная схема комплексной системы, показанная на рис. 8.10 и содержащая п параллельных каналов с суммированием их выходных сигналов. Здесь 1Гдг(р), Xi{t) и у,(f) - соответственно передаточная функция, выходной сигнал и погрешность t-ro датчика, приведенная к его входу, Flip) - передаточная функция t-ro канала вычислителя, t=l, 2, . . ., п, п2. Каждый из каналов вычислителя представляет собой линейный динамический фильтр. В соответствии с рассматриваемой структурной схемой для изображений выходного сигнала комплексной системы g (О и ошибки измерения e(t)=g(t)-g{t) запишем G (р) = S (Р) (р) G (р) + 2 (р) f, (р) У, (р), E(p) = G(p)-G{p) = 1-2 Я,(Р),-(Р) 1=1 xG(p)-2 W,i{p)F:{p)V(p). (8.12) 257 Передаточные функции каналов вычислителя обычно выбирают так, что выполняется условие .2 д,-(Р)/=/(Р) = 1- (8-13) Как видно из (8.12), при этом ошибка измерения не зависит от задающего воздействия g{t) и определяется лишь погрешностями датчиков. Равенство (8.13) называется условием инвариантности, а система, в которой оно выполняется,- инвариантной по задающему воздействию. Задающее воздействие проходит на выход такой системы без какого-либо запаздывания или сглаживания, т. е. воспроизводится без динамической ошибки. Это особенно важно в случае, когда комплексная измерительная система выполняет функции чувствительного элемента какой-либо другой автоматической системы (например, системы стабилизации), динамические свойства которой должны быть очень высокими. Поскольку условие инвариантности накладывает ограничение лишь на взвешенную сумму передаточных функций Fi(p), а не на каждую из них в отдельности, остается -определенная свобода в их выборе, которая может быть использована для уменьшения ошибки от погрешностей датчиков. Рассмотренная структурная схема комплексной системы, которую принято называть -канальной схемой фильтрации, не является единственно возможной. Однако при анализе динамических свойств и точности любой линеаризованной комплексной системы ее структурную схему всегда можно преобразовать к эквивалентной схеме фильтрации. Принципы построения двухканальных комплексных систем радиоавтоматики. Остановимся на часто встречающемся случае комплексирования следящего радиотехнического измерителя с одним нерадиотехническим датчиком. При выборе схемы такой двухканальной комплексной системы радиоавтоматики необходимо учитывать, что дискриминатор следящего радиотехнического измерителя можно считать линейным звеном лишь при малых значениях ошибки. Поэтому для уменьшения вероятности срыва слежения и повышения помехоустойчивости желательно, чтобы эффект комплексирования проявился в высокой точности не только системы в целом, но и самого радиотехнического измерителя. Схема фильтрации таким качеством не обладает, так как условия работы радиотехнического измерителя после комплексирования в ней нисколько не улучшаются и используется лишь его выходной сигнал. Ясно, что при разработке схемы комплексной системы радиоавтоматики за основу должна быть взята обычная схехма захмкнутой системы, а сигнал с нерадиотехнического датчика следует ввести непосредственно в ее контур. На рис. 8.11, а показан вариант такой схемы для случая, когда нерадиотехнический датчик является безынерционным звеном с единичным коэффициентом передачи, погрешностью Уг (О и выходным сигналом (О =g (0+*2(0- Радиотехнический измеритель имеет обычный выходной сигнал Xi{t)=g(t)+v(t).
|