
|
|
|
Главная -> Разомкнутые системы радиоавтоматики Практически обратное преобразование выполняют путем разложения Х2{р) на простейшие дроби с последующим использованием таблиц преобразований Лапласа. Пример 1.1. Дано уравнение системы Tx2-\-x2. = kxi и входное воздействие 1 {t) = Xт sm Qt. Требуется определить процесс на выходе. В соответствиис (1.5)получаем (t) = kxi (,t)/{l +Тр), откуда W (р) = й/(1 -\-Тр). По таблицам изображений Лапласа находим Тогда Разложим (р) на простейшие дроби: 1 А Bp С {А + ВТ) p + jB+CT) p + AQ + C <l + rp)(p2+fl2) l+rpV + SV + (l + Tp){p + Q) Приравнивая коэффициенты при одинаковых степенях р в числителе левой и правой частей этого равенства, получим систему алгебраических уравнений для определения коэффициентов: А + ВТ=0, В--СГ=0, Лй2--С=1. Откуда находим Л = В = Х , с=у. Воспользовавшись таблицами изображений Лапласа, находим L-1 L-1 Bp - 3 т = BcosQt=- -t/T cosQ ~ Q * 1 + 2 Q и окончательно получаем процесс на выходе системы лга () = L-1 [2 (-y)l = 2п (О + л:2у (О = йд: 1 -}- rQa 1 + rQa (sin Qt-TQ cos QO, лггп (0 = kx 1 + r2Q2 ay (0 = 1; ,, (sin - cos QO. Использование переходной и весовой функций. Переходная функция служит для оценки качества работы автоматической системы в переходном режиме. Переходной функцией линейной динамической системы называют отклик этой системы на единичную ступенчатую функцию, определяемую как ( О при < О, < =Unp ,>o. При заданном дифференциальном уравнении линейной динамической системы ее переходную функцию наиболее просто определить следующим образом. Записав дифференциальное уравнение в символической форме и обозначив переходную функцию q{t), получим из (1.5) q{t) = W(p)lit). (1.18) Перейдем в область изображений по Лапласу: Qip) = W(p)I(p), I{p) = L[l(t)] = l/p. Откуда, используя таблицы преобразования Лапласа и снова переходя во временную область, получим jW(p) 1(0- (1.19> Необходимость умножения на 1 (t) функции, полученной в результате обратного преобразования Лапласа, обусловлена тем, что переходная функция как реакция на воздействие, отличное от нуля лишь при tO, равна нулю при /<0, т. е. 9()=0при <0, что и обеспечивается вЬедением множителя \(t). qlt) 7 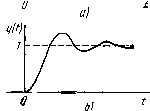 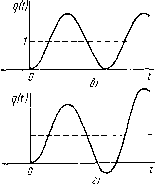 Рис. L.13 Графическое изображение переходной функции называют переходной характеристикой. Типовые переходные характеристики автоматических систем приведены на рис. 1.13. Кривые на рис. 1.13, а, 5 соответствуют устойчивой системе, кривые на рис. 1.13, б, г - неустойчивой. Пример 1.2. Пусть система описывается уравнением {Tp4-[)y = kg или у (t)~ k d k g(t), где Р - -ТГ Тогда передаточная функция Н = , -г P=+i< 1 + Гр и Q(P) = + Тр) [р 1 + Тр \+Тр
Отсюданаходим q{t) = L-[Q(p)\=kJL- = k {1 1 (t)] = k(\-e-*l) 1 (t). Весовой функцией линейной системы называют отклик этой системы на единичную дельта-функцию, которая может быть определена как производная единичной ступенчатой функции: / Л1 (п f О при t ф(), б(0 = = Г (1.20) dt \оо при = 0, причем 5 b{tj) dti = l [t] и 5 8{t)dt=l для любых а, р>0. Эту функ- -00 -а цию иногда называют функцией веса. Дельта-функция обладает фильтрующим свойством, предельно упрощающим вычисление определенных интегралов, в подынтегральное выражение которых эта функция входит как сомножитель ti + b л S f{t)6{t,-t)di = f{t,) (1.20а) .при любых 0<а, b-f оо для любой ограниченной функции f(t). Кроме того, для любой ограниченной функции f{t) имеет место равенство f {t)6(t)=f(0)6(t), если /(0)0, и /(06(0=0, если /(0)=0. Записав дифференциальное уравнение линейной динамической системы в форме (1.5), с учетом (1.18) и (1.20) получим w{t) = W ip) 6(t) = W ip)p\ it) = pW (p) 1 (t) = pq{t)=. (1.21) Таким образом, функция веса динамической системы равна производной переходной функции этой системы. Поскольку функция w (t) - реакция динамической системы на воздействие, приложенное к ее входу в момент времени =0 и отсутствующее при <0, а никакая реальная система не может реагировать на входное воздействие до того, как оно поступило на ее вход, ясно, что для всякой реальной динамической системы w(t)=0 при <0. Требование ш(0-0 при < О (1.22) .называют условием физической реализуемости системы. Поэтому в каждом частном случае, когда весовой функцией системы является некоторая конкретная функция времени f{t), которая определена для всех t в интервале (-oo, -f оо) и не равна нулю при <0, весовая функ- €4ия °7/(0 при tO, ()=!о при t<0, (1-23)
|