
|
|
|
Главная -> Разомкнутые системы радиоавтоматики Виды нелинейностей. Одним из характерных видов нелинейных статических характеристик звена Х2=Р{Хт), где х и х - входная и выходная величины, являются характеристики релейного типа (рис. 5.1). Они присущи часто используемым в автоматических системах реле различных типов (электронные, электрические, пневматические, механические и др.) [20]. 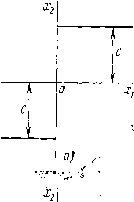
-b -тЬ I I О mb b Рис. 5.1 Характеристики на рис. 5.1, а, б относятся к двухпозиционному реле (имеет два устойчивых положения). Первый случай соответствует идеальному реле, второй - реле с гистерезисной петлей. Характеристики на рис. 5.1, б, г относятся к трехпозиционному реле (имеет три устойчивых положения). Первый случай соответствует идеальному реле, второй - реле с гистерезисной петлей. Для характеристики на рис. 5.1, а может быть записана аналитическая зависимость вида X2 = F (Xj) resignXi, для характеристики на рис. 5.1, б с при Xib, Х2 = \ О при < и п ( -с п ри Xi y-b. Подобным образом можно записать аналитические выражения для характеристик, изображенных на рис. 5.1, в, г. Нелинейная статическая характеристика может иметь непрерывный вид (рис. 5.2). Характеристики на рис. 5.2, а, б соответствуют ограниченно линейному звену с насыщением. Такие характеристики имеют, как правило, все усилители. Характеристика на рис. 5.2, в Рис. 5.2  О ь. соответствует ограниченно линейному звену с зоной нечувствительности и насыщением. Такие характеристики имеют обычно исполнительные элементы (двигатели различного вида). В этом случае входная величина х- представляет собой напряжение, прикладываемое к двигателю, а выходная величина лга - его частоту вращения. Появление зоны нечувствительности объясняется здесь наличием сил сухого трения на оси двигателя, редуктора и приводимого в движение объекта. 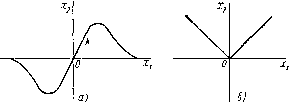 Рнс. 5.3 Криволинейные статические характеристики произвольного типа (рис. 5.3) свойственны многим радиотехническим функциональным элементам. Так, характеристики, подобные изображенным на рис. 5.3, а, встречаются в различного рода дискриминаторах. Характеристики на рис. 5.3, б, в соответствуют линейному и квадратичному детекторам. Наряду с однозначными характеристиками (рис. 5.3) имеют место и неоднозначные характеристики (рис. 5.4). Характеристика на рис. 5.4, а соответствует петлеобразной (гистерезисной) зависимости. Она может определяться, например, кривой намагничивания сердечника. Характеристика на рис. 5.4, б соответствует люфту в механической передаче, например в редукторе, соединяющем двигатель с объектом. Встречаются статические характеристики и более сложного вида. Динамические нелинейности описываются нелинейными дифференциальными уравнениями. Так, в функции входной или выходной 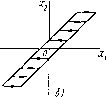 Рис. 5.4 величины может меняться постоянная времени в уравнении апери. одического звена первого порядка; Y (Л) 2. Xj F{x) X2 + X2 = kx. Другой пример - зависимость коэффициента демпфирования колебательного звена от входной величины х + F (х,) х + х=- kXi. В некоторых случаях в функции от входной или выходной величины может меняться структура автоматической системы, что тоже соответствует появлению нелинейности. Подобные системы называют системами с переменной структурой. Наконец, для улучшения качества управления или для придания системе желаемых свойств можно применять нелинейные законы управления. Так, при формировании управляющего воздействия в функции ошибки управления могут быть использованы зависимости u = k{\+b\e\\e, u = k (sign е) К1 + & I е I , где k я b - константы. В первом случае будет более энергичное действие регулятора при больших отклонениях е и большой запас устойчивости в установившемся состоянии. Во втором случае при больших отклонениях будет менее энергичное, но более плавное управление и повышенная точность (возможно с меньшим запасом устойчивости) в установившемся состоянии. Подобные нелинейные законы носят название функциональных. Кроме того, могут быть использованы так называемые логические нелинейные законы управления, когда формирование управляющего воздействия происходит с помощью различных логических устройств, оптимизирующие нелинейные законы, которые соответствуют оптимальной нелинейной фильтрации, и др. Особенности процессов в нелинейных системах. В нелинейных автоматических системах процессы имеют особенности, которые не встречаются в линейных системах. В нелинейных системах неприменим принцип суперпозиции, который позволяет в линейных системах определять выходную величину как сумму составляющих, вызываемых действием различных факторов (задающего воздействия, возмущающих воз(действий, помех). Выход-
|
|||||||||||||