
|
|
|
Главная -> Разомкнутые системы радиоавтоматики iviaicMui и ческие ижидание и дисперсия ошиоки слежения, ларактер их изменения зависит от структуры и параметров фильтра устрорютва радиоавтоматики, вида задающего воздействия g{t) и интенсивности флуктуационного напряжения на выходе дискриминатора. Пусть в качестве названного фильтра используются два последовательно соединенных интегратора. После размыкания системы напряжение на выходе первого интегратора сохраняется неизменным, а на выходе второго, следовательно, линейно нарастает. В такой же, но замкнутой следящей системе, на вход которой подается управляющее воздействие (3.41), в установившемся режиме на выходе первого интегратора образуется напряжение с фиксированным средним значе-нием\ Из этих рассуждений следует, что при наличии двух интеграторов й размыкания системы на выходе второго интегратора продолжается формирование процесса, совпадающего с g{t) (3.41). § 3.2. ПРИМЕРЫ РАСЧЕТА ДИСПЕРСИИ ОШИБКИ В РАДИОТЕХНИЧЕСКИХ СИСТЕМАХ Система автоматического сопровождения по направлению. Функциональная схема одного из каналов системы с суммарно-разностной обработкой представлена на рис. 3.7. В нее входят: пеленгацнонное- Исполнительное устройства [Уста I
ПриемникТ чпчг 1 Приемник R j Пеленгаи,ионное устроистйо Рис. 3.7 Г 1 . Угипительно-преоВ-\ \imiijmui,ee устроисюб устройство, состоящее из антенны Л, фазирующего кольца ФК на волноводах или коаксиальных кабелях, смесителей - суммарного СМ1 и разностного СМ2 каналов гетеродина Г, усилителей промежуточной частоты - суммарного УПЧ\ и разностного УПЧ2 каналов, устройства быстрой автоматической регулировки усиления БАРУ, фазового детектора ФД и детектора огибающей ДО; усилительно-преобразующее устройство, состоящее из предварительного усилителя У и усилителя мощности У2, исполнительное устройство, состоящее из исполнительного двигателя Д, редуктора Р и карданова подвеса КП. Принцип действия этой системы изложен в § 1.2 и 1.6. 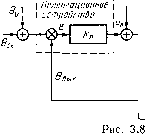 Усилительна - пре одра - \ зующее устроистба
На рис. 3.8 приведена структурная схема рассматриваемой системы, представляющей собой последовательно соединенные звенья: пелен-гационное устройство - безынерционное звено с коэффициентом передачи л=0,01 В/град, предварительный электронный усилитель - безынерционное звено с коэффициентом передачи (ко-us эффициентом усиления) k, значение которого требуется определить в процессе расчета, ц усилитель мощности - апериодическое звено первого порядка с передаточной функцией Wy(p)=V(l+7yP). где У=10 - коэффициент передачи (коэффициент усиления по напряжению), Ту=0,0125 с - постоянная времени усилителя мощности, а также исполнительное устройство, содержащее двигатель - инерционное интегрирующее звено с передаточной функцией д(р)=д/[р(1+Гдр)], где kp= =50 град/(В -с) - коэффициент передачи двигателя по скорости, Тд= =0,05 с - электромеханическая постоянная времени двигателя; редуктор и карданов подвес с коэффициентом передачи р = 1/г, где г = = 1000 - передаточное отношение редуктора. Для описания движения сопровождаемого объекта по направлению принят типовой входной сигнал следящей системы (§ 3.1) со спектральными плотностями для угловой скорости Q и угла 9: 2DqT 2DqT где Dc=l градс=3600 угл.мин7с - дисперсия угловой скорости движения объекта; 7=5 с - среднее время движения объекта по прямой. Пересчитанная на вход системы помеха 9, (рис. 3.8) принята в виде белого шума со спектральной плотностью S{u>)=N = = 0,000055 градГц=0,2 yrл.минVГц. В процессе расчета требуется определить суммарную среднеквадратичную ошибку сопровождения, условия ее минимизации и найти рекомендуемые (оптимальные) значения для общего коэффициента усиления канала управления (добротности по скорости) Ki= =пэудр[с~] и для коэффициента усиления электронного усилителя кэ. Передаточная функция разомкнутой системы W[{p) = k k \+рТр{1-{- Тр) р (1 -\-рТ) (1 -Ь рТ) Передаточная функция замкнутой системы , W (р)\, Кг Н{р): l + Wip) TyTj,p+iTy+Tj,)p + p + Ki передаточная функция замкнутой системы для ошибки по задающему воздействию Pl TT p + (T+T.,)p + p + Ki-Дисперсия ошибки, вызванной движением объекта: i = i JiЯЛ/co)5oИйfш = - со f /сй(14-/м) Гу(1Ч-/сйГд) 2РйГсй 1 2л J ГуГд (/сй)з + (Гу + Гд) (;cu)2 + /cu + /(i (1 Н-шП 2я - со ? 2РдГ[Гу + (Гу + Гд)сй+ l]rf(u J ГГуГдО-сй)*-Ь(ГГу+ГГд+ГуГд) +(7+7у+7д) (/w) -b(l+/Cin/M+/CiP* Интегрируя последнее выражение в соответствии с приложением 1, получим {Ао + АгК + ЛКЬОдТ 1 /((So + Si/Ci)(l-/Ci Cio) А = ТТТ1; В Т + ТТ + ТТлТ\ Bi=.T\ В последних выражениях использовано критическое значение общего коэффициента усиления Kio, при котором замкнутая система теряет устойчивость. Оно может быть получено применением любого критерия устойчивости к рассматриваемой системе. Условие устойчивости /Ci< 1/Г,+= 100 с- Подставляя в (3.44) полученные значения коэффициентов, имеем KiT) (1- Ki(\KiT) (3.45) Первое слагаемое в последнем выражении представляет собой дисперсию ошибки в идеальной системе при Ту=Тд=0, т. е. в том; случае, когда канал управления сводится к идеальному интегрирующему звену с передаточной функцией W (p)=Ki/p- В этом идеализированном случае, учитывая обычно выполняемое неравенство KiTl, можно пользоваться упрощенной зависимостью DiiDa/Kl- Тогда среднеквадратичная ошибка слежения будет равна отношению среднеквадратичной угловой скорости движения объекта к добротности, по скорости, т. е. Oi=crQ Ci.
|
|||||||||||||||||||||||||||||||||||||||||||||||||