
|
|
|
Главная -> Разомкнутые системы радиоавтоматики вен -20 дБ/дек и соответственно число частот сор,-, меньших частоты среза, не будет четным. Так, в рассматриваемом примере ЛАХ-2 пересекает ось частот с наклоном -40 дБУдек, при этом все три частоты сор, (нечетное число!) оказываются меньше частоты среза. ЛАХ-3 пересекает ось частот с наклоном -60 дБ/дек и при этом левее точки со лежит лишь одна (нечетное число!) точка, соответствующая частоте сорд. И в том и в другом случае система неустойчива. § 2,2. ПОКАЗАТЕЛИ КАЧЕСТВА Общие сведения. Основным условием работоспособности замкнутой системы радиоавтоматики является ее устойчивость. Однако для нормального функционирования автоматической системы одной устойчивости недостаточно. Система должна удовлетворять также определенным требованиям, предъявляемым к качеству ее работы. Качество работы систем радиоавтоматики характеризуется показателями качества, которые можно разделить натри группы: показатели точности, показатели запаса устойчивости и показатели быстродействия. I Показатели качества, определяемые по переходной характеристике. Рассмотрим переходную характеристику системы, представленную на рис. 2.9. На основании переходной характеристики определяют такие показатели качества переходного процесса, как перерегулирование, определяющее запас устойчивости, и быстродействие. Перерегулированием называют относительную величину максимального отклонения управляемой величины ух от установившегося значения у{оо) в переходном процессе, т.е. Рекомендуемые значения перерегулирования, полученные на основании опыта эксплуатации автоматических систем, составляют 10- 30%, Быстродействие системы определяют по длительности переходного процесса t- Длительность переходного процесса определяют как время, протекающее от момента приложения на вход единичного скачка до момента, после которого имеет место неравенство \y(t)-y(cx)\A при tt , где Д - заданная малая постоянная величина, представляющая собой допустимую ошибку, составляющую обычно 1-5% значения скачка на входе. 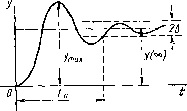 Рис. 2.9 Иногда дополнительно к величине перерегулирования а задается допустимое число колебаний, которое может наблюдаться в течение времени переходного процесса. Это число составляет обычно 1-2. В некоторых системах колебания вообще не допускаются, а иногда допускается до 3-4 колебаний. Частотные показатели качества. В задачах анализа и синтеза систем радиоавтоматики широко используются частотные методы. При этом наиболее удобными для оценки качества работы системы являются частотные показатели качества переходного процесса, такие, как Запасы устойчивости по амплитуде и по фазе и показатель колебательности, который также определяет запас устойчивости. Как было показано в § 2.1, при изменении добротности условно устойчивой системы АФХ приближается к критической точке (-1, /0). При этом переходная характеристика системы становится более колебательной - всзрастает перерегулирование, длительность переходного процесса и число колебаний в переходном процессе. Чтобы указанные показатели качества переходного процесса не превышали допустимых по техническому заданию на проектируемую систему значений, АФХ должна быть несколько удалена от критической точки (-1, /0). Степень удаленности АФХ системы от критической точки характеризуется запасами устойчивости. 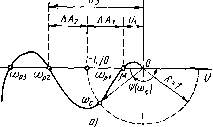 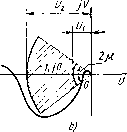 Рис. 2.10 Запасом устойчивости по амплитуде АЛ называют расстояние между критической точкой (-1, /0) и ближайшей к ней точкой пересечения АФХ с отрицательной полуосью абсцисс, как показано на рис. 2.10, а, т. е. АЛ = min {АЛь АЛз}, где АЛ1,2=1-Л (copi.j). Для хорошо демпфированных систем АЛ0,6. Запас устойчивости по фазе характеризует удаленность точки АФХ, соответствующей частоте среза со, от критической точки (-1, /0). Его определяют в соответствии с рис. 2.10, а, как угол р =180°-! г!) (ад . (2.14) В хорошо демпфированных системах запас устойчивости по фазе составляет 30-60° (демпфированием называют повышение запаса устойчивости системы). В соответствии с заданными значениями запасов устойчивости по амплитуде и по фазе может быть построена запретная область для АФХ проектируемой системы, как показано на рис. 2.10, б. Показатель колебательности. Использование рассмотренных показателей запаса устойчивости связано с необходимостью задания двух чисел: АЛ и р. В этом отношении более удобно определять запас устойчивости по показателю колебательности. Показателем колебательности М называют абсолютный максимум АЧХ замкнутой системы, отнесенный к значению АЧХ при со=0. Для астатических систем Я (0)1 = 1 и тогда Л1шах = тахЯ (/со), (2.15) как показано на рис. 2.11. Имеется определенная связь между показателем колебательности системы и характером ее переходного процесса: при увеличении М возрастает перерегулирование, длительность переходной характеристики и число колебаний в переходном процессе. H\H(ju>}\ тпх 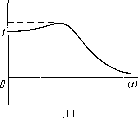 Рис. 2 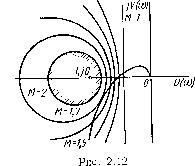 Рекомендуемые значения показателя колебательности составляют 1,1-1,5. Показатель колебательности системы можно определить также по АФХ разомкнутого контура этой системы. Обозначим: М = Я(/со). Тогда V (Q1) + и Возводя в квадрат правую и левую части этого равенства и освобождаясь от знаменателя, после несложных преобразований получим {U + Cy + V = R\ С = М1{М-\), R=Ml{M-\). (2.16) (2.17) (2.18) Это уравнение окружности с радиусом Rue центром в точке (-С, 0). Задаваясь для М рядом значений, получим в соответствии с (2.16) семейство окружностей, радиус которых, как видно из (2.18), убывает с ростом М. Это показано на рис. 2.12 при Л11. Если в этой же системе координат (и, V) построить АФХ разомкнутой системы, то М
|