
|
|
|
Главная -> Разомкнутые системы радиоавтоматики Оценим порядок величины коэффициента передачи временного дискриминатора. Пусть 0=10 В, Г=10-з с. Тогда йвд=20-10 В/с= =20 мВ/мкс. Динамические характеристики временного дискриминатора определяются свойствами сглаживающих цепей (/?С-фильтров нижних частот), которые являются апериодическими звеньями первого порядка с постоянными времени 7 вд 0,1 с. Таким образом, временной дискриминатор как динамическое звено автоматической системы является апериодическим звеном первого порядка с передаточной функцией W,ip)kJ{l + T,p). Статические эквиваленты дискриминаторов. Радиотехнические системы работают в условиях мешающих воздействий (помех), которые могут существенно снизить качество работы систем радиоавтоматики. При анализе влияния помех на работу системы радиоавтоматики необходимо учитывать нелинейность дискриминационной характеристики дискриминатора системы. При этом полезной оказывается обобщенная структурная схема радиотехнической следящей системы, представленная на рис. 1.41, состоящей из нелинейного безынерционного дискриминатора с характеристикой Up=F{e) и линейной части с передаточной функцией Wo{p) = W{p)/kj-p, где йдр - коэффициент передачи дискриминатора, соответствующий линейному участку дискриминационной характеристики; W (р) - передаточная функция разомкнутого контура линеаризованной системы радиоавтоматики.
Рис. 1.40 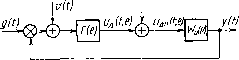 Рис. 1.4! Ограничимся случаем аддитивной помехи, когда искаженное помехой напряжение сигнала uit) представляет собой аддитивную смесь сигнала и помехи, или, другими словами, алгебраическую сумму собственно напряжения сигнала a{t; g), содержащего информацию об управляющем воздействии g(i), и напряжение помехи (0. т. е. Ucn(0 = =u{i; g)+ n(0- При этом выходное напряжение дп(0 дискриминатора системы радиоавтоматики будет состоять из напряжения ошибки Ид() и напряжения помехи Цп(0 (см- рис. 1.41): Идп(0= д(0+ п(0. где Ид(0=дрб(0- При наличии помехи ul(t) напряжение Ид(0 зависит не только от рассогласования системы e{t), но и от относительной интенсивности помехи. Пусть и Р - соответственно мощности полезного сигнала и помехи на входе дискриминатора. Относительная интенсивность полезного сигнала и помехи характеризуется отношением q=PJPa, которое называют отношением сигнал/ш1ум по мощности. Дискриминационная характеристика дискриминатора Цд=Р(е), рассмотренная в предыдущих разделах, при наличии помехи существенно зависит от отношения (7 т. е. =f (е; q). При уменьшении этого отношения максимумы дискриминационной характеристики снижаются и коэффици-
S(o,e) Рис. 1,43 ент передачи /др дискриминатора падает, как показано на рис. 1.42. Это объясняется нормирующим действием нелинейных элементов радиоприемного устройства, таких, как амплитудный ограничитель, детектор, устройство автоматической регулировки усиления и т. д. Напряжение помехи на выходе дискриминатора uit) представляет собой случайный процесс со спектральной плотностью мощности 5 (со; е), зависящей от рассогласования е системы радиоавтоглатики. Часто напряжение п(0 имеет постоянную спектральную плотность в полосе частот, значительно превышающей полосу пропускания линейной части системы с передаточной функцией Wip)- В этом случае помеху Ua{t) можно считать белым шумом и представить ее в виде u-n{i) = VS {0; e)Ug{i), где 5(0; е) - значение спектральной плотности напряжения помехи u{t) на нулевой частоте; о(О белый шум со спектральной плотностью, равной 1 ВГц. Зависимость S (0; е) от рассогласования е называют флуктуацион-ной характеристикой дискриминатора. Качественный характер ее показан на рис. 1.43. Дискриминационная F (е\ q) и флуктуационная 5(0; е) характеристики дискриминатора являются важнейшими его характеристиками, используемыми в задачах исследования систем радиоавтоматики, работающих в условиях аддитивных помех. Объекты управления систем радиоавтоматики. Объектами управления типовых систем радиоавтоматики, рассмотренных в § 1.2, являются: управляемые генераторы - в системах АПЧ, устройства временной задержки - в системах АСД, устройства управления положением диаграммы направленности - в системах АСН. Управляемый генератор У Г системы АПЧ представляет собой гене- ратор гармонических колебаний. В цепь резонансного контура этого генератора включен элемент, управляющий частотой его колебаний, например полупроводниковый диод V (варикап), емкость запертого )9-гг-перехода которого зависит от приложенного к этому переходу управляющего напряжения Wy, как показано на рис. 1.44. При изменении емкости р-п-перехода варикапа изменяется резонансная частота контура генератора и соответственно частота его колебаний. При малых относительных изменениях Д/ частоты колебаний управляемого генератора, т. е. при Д/г</о (/о - промежуточная частота системы АПЧ), справедлива зависимость Af=kj.Uy, [Лг]=Гц/В, т. е. статическая характеристика управляемого генератора линейна.
Rb С, Рис. 1.44 При скачкообразном изменении управляющего напряжения соответствующее значение частоты колебаний /г=/го+г у устанавливается за время, равное нескольким десяткам периодов колебаний генератора, т. е. управляемый генератор является апериодическим звено.м первого порядка с передаточной функцией . г (р) и Ар) + где r,= 10Vfr. Обычно постоянная времени Гр на несколько порядков меньше постоянных времени остальных звеньев системы АПЧ. В этом случае ею можно пренебречь и рассматривать управляемый генератор как безынерционное звено с передаточной функцией W{p)k.
Рис. 1.45 Объект управления системы АСД - устройство временной задержки, или временной модулятор, состоит из генератора пилообразного напряжения ГПН и компаратора К, рис. 1.45 (применяются и другие схемы временного модулятора - на ждущем мультивибраторе, на фантастроне). ГПН запускается в момент излучения зондирующего импульса fft. При этом на выходе ГПН возникает линейно изменяющееся во времени напряжение и, поступающее на один из входов компаратора. На второй вход компаратора поступает управляющее напряжение гу, пропорциональное (с точностью до ошибки сопровождения)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||