
|
|
|
Главная -> Разомкнутые системы радиоавтоматики 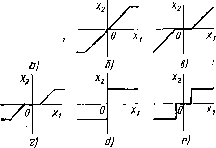
Рис. 1.5 соответствует установившемуся режиму; 2) когда эта зависимость соответствует неустановившемуся (переходному) режиму. В первом случае зависимость выход - вход есть статическая характеристика элемента, во втором случае - динамическая характеристика. Статическая характеристика элемента описывается алгебраическим уравнением. По виду статической характеристики элементы автоматики подразделяют на две группы - линейные звенья и нелинейные звенья Статическая характеристика линейного звена имеет вид X2=kxu где k - коэффициент передачи линейного звена, име-юш,ий размерность [А] = [a;2][a;i]-i. Статическая характеристика нелинейного звена в обш,ем случае имеет вид X2=f{Xi), где /( )-некоторая нелинейная функция своего аргумента. На рис. 1.5 представлены типовые статические характеристики звеньев: а - характеристика линейного звена; б - ж - характеристики нелинейных звеньев: б - характеристика звена с насыш,ением; в - характеристика звена с зоной нечувствительности; г - характеристика звена с насьпцением и с зоной нечувствительности; д - характеристика звена релейного действия; е - характеристика звена релейного действия с зоной нечувствительности; ж - типовая дискриминационная характеристика. Суш,ественно, что статические характеристики звеньев замкнутых автоматических систем являются нечетными функциями, т. е. обладают свойством/(-х)=-/(х). Физически это означает, что с изменением знака входной величины звена изменяется знак его выходной величины, что принципиально необходимо для функционирования замкнутых автоматических систем. Динамическая характеристика элемента автоматики определяется дифференциальным уравнением, описывающим динамические процессы в этом элементе. Например, часто используемый в автоматических системах RC-фплътр нижних частот описываегся дифференциальным уравнением первого порядка: TU2+U2 = Ui. Уравнением такого же вида1Тд0д+0д=Адиу описывается процесс изменения скорости вращения ротора электродвигателя Од под действием приложенного к двигателю управляющего напряжения Uy. Поэтому С-фильтр нижних частот и электрический двигатель обладают аналогичными динамическими характеристиками и относятся к одной и той же группе динамических звеньев. Типовые динамические звенья автоматических систем рассмотрены в § 1.5. Классификация систем радиоавтоматики по * характеру внутренних динамических процессов. Всякая автоматическая система пред ст авляет собой соединение отдельных элементов (звеньев). Поэтому ди намические процессы в каждом звене отражаются на?характере дина мических процессов в автоматической системе в целом. Математически это обстоятельство находит свое выражение в том, что динамические процессы в автоматической системе описываются всей совокупностью уравнений звеньев, входящих в состав этой системы, или одним уравнением, полученным из системы уравнений звеньев. В зависимости от характера динамических процессов и соответственно от вида уравнений, описывающих эти процессы, звенья и системы разделяют на следующие группы. Системы непрерывного и дискретного действия. Звенья, непрерывным изменениям входной величины которых соответствуют непрерывные изменения выходной величины, называют звеньями непрерывного действия. Процессы в таких звеньях описываются дифференциальными уравнениями. Помимо звеньев непрерывного действия в автоматических системах используются также звенья дискретного действия. Непрерывным изменениям входной величины звена дискретного действия соответствуют дискретные, скачкообразные изменения его выходной величины. Динамические процессы в звеньях дискретного действия описываются разностными уравнениями. Автоматические системы, состоящие лишь из звеньев непрерывного действия, являются системами непрерывного действия. Процессы в таких системах описываются дифференциальными уравнениями. Если же в составе автоматической системы имеется хотя бы одно звено дискретного действия, то система в целом становится системой дискретного действия и процессы в ней описываются разностным уравнением. Системы линейные и нелинейные. Звенья, процессы в которых описываются линейными (алгебраическими, дифференциальными или разностными) уравнениями, называют линейными звеньями. Звенья, процессы в которых описываются нелинейными уравнениями, называют нелинейными звеньями. Автоматические системы, в состав которых входят лишь линейные звенья, являются линейными системами. Процессы в линейных автоматических системах описываются линейными уравнениями. Если же автоматическая система содержит хотя бы одно нелинейное звено, то система является нелинейной системой и процессы в ней описываются нелинейным (дифференциальным или разностным) уравнением. Важным частным случаем нелинейных систем является автоматическая система релейного действия, т. е. система, содержащая звено релейного действия. Звеном релейного действия является, например, рулевая машинка подвижного объекта. Системы стационарные, и нестационарные. Устройства (элементы), входящие в состав автоматической системы, характеризуются некоторыми величинами, влияющими на динамические процессы в этих устройствах и в системе в целом. Например, усилитель напряжения характеризуется коэффициентом усиления. Кроме того, если коллектор- ная нагрузка транзисторного усилителя имеет индуктивный характер, то помимо коэффициента усиления существенное влияние на процессы в усилителе оказывает постоянная времени усилителя, равная отношению индуктивности нагрузки к активному сопротивлению коллекторной цепи усилителя. Такие величины называют параметрами устройства. Элементы автоматических систем, параметры которых не изменя-кугся в процессе работы автоматической системы, называют звеньями с постоянными параметрами или стационарньми звеньями. Постоянство параметров таких звеньев находит свое математическое выражение в постоянстве коэффициентов уравнений, описывающих процессы в этих звеньях. Поэтому стационарным звеньям соответствуют уравнения с постоянными коэффициентами. Помимо стационарных звеньев в автоматических системах часто встречаются звенья нестационарные, т. е. такие устройства, параметры которых изменяются в процессе работы автоматической системы. Примером нестационарного звена может служить самолет. Одной из важнейших характеристик -самолета, как объекта управления, является его момент инерции относительно центра масс в плоскости управления. По мере выгорания топлива при полете самолета его масса и соответственно момент инерции изменяются, что отражается на динамике процессов управления. Математически же момент инерции является одним из коэффициентов уравнения движения самолета. Поэтому уравнение движения самолета - это уравнение с переменными коэффициентами. Таким образом, нестационарным звеньям соответствуют уравнения с переменными коэффициентами. Если автоматическая система состоит лишь из стационарных звеньев, то она сама является стационарной системой и ей соответствует уравнение с постоянными коэффициентами., В случае же, когда в составе автоматической системы имеется хотя бы одно нестационарное звено, система в целом является системой нестационарной и ей соответствует уравнение с переменными коэффициентами. Системы с распределенными параметрами и системы с сосредоточенными параметрами. Если в составе автоматической системы имеются устройства типа длинных линий, волноводов и т. д., т. е. устройства, в которых имеет место явление распространения процесса, то такие системы описываются дифференциальными уравнениями в частных производных и называются системами с распределенными параметрами. Если же подобные устройства в автоматической системе отсутствуют, то система описывается обыкновенным дифференциальньш уравнением и называется системой с сосредоточенными параметрами. Системы с запаздыванием. Наличие в составе автоматической системы устройства с распространением (а также некоторых других устройств, например, цифровых вычислительных машин) приводит к явлению запаздывания. Характерным примером может служить система радиоуправления космическими летательными аппаратами. Радиоканал связи наземного пункта управления с летательным аппаратом является устройством с распространением , но сам процесс распространения радиоволн, очевидно, не интересует инженеров-специа-
|