
|
|
|
Главная -> Разомкнутые системы радиоавтоматики Тогда где ii{t), -токи в стоковых цепях транзисторов. Усредняя за период, получаем l,2 = l iu ( оО d Ы) = -io± ~- S o cos Ф о и находим напряжения на стоковых нагрузках; hi,2=.Rhi,2 и выходное напряжение дискриминатора д = н1 - н2 = - 5/? созф 5/ созф. (1.80) Определим измеряемый фазовый сдвиг Аф между напряжением сигнала и опорным напряжением в соответствии с рис. 1.29, как Аф= =я/2-ф, т. е. в качестве входной величины фазового дискриминатора будем рассматривать дополнение угла ф до я/2. Тогда = u S/? cos ф = он sin Аф, откуда при малых фазовых сдвигах (Аф30°) имеем д = ы 5/? Аф = у%фдАф, где йфд= о5/н - коэффициент передачи фазового дискриминатора, В/рад. Таким образом, по виду статической характеристики фазовый дискриминатор является ограниченно-линейным звеном. Рассмотрим процессы в фазовом дискриминаторе в случае, когда его входная величина - фазовый сдвиг Аф - не остается постоянной, а изменяется во времени. Составим схему замещения стоковых цепей дискриминатора, как показано на рис. 1.30, где Ri - внутреннее сопротивление транзистора; г= о5/?;Аф/2 - напряжение эквивалентного генератора. Переходя к изображениям, на основании схемы замещения получаем где АФ(/7) - изображение Аф(); Гф=/н11 - постоянная времени фильтра нижних частот. Отсюда находим изображение выходного напряжения дискриминатора  и его передаточную функцию Таким образом, по виду динамической характеристики фазовый дискриминатор является апериодическим звеном первого порядка. Фазовые дискриминаторы широко используются в системах фазовой автоматической подстройки частоты. Найдем зависимость выходного напряжения фазового дискриминатора от частотного рассогласования системы автоподстройки частоты, т. е. от отклонения частоты входного сигнала от частоты опорного напряжения. Обозначим: (j)=2nf- угловая частота напряжения сигнала; сйо=2я/о - частота опорного напряжения; А/=/с-/о - отклонение частоты напряжения с от частоты напряжения оп-Пусть к начальному моменту времени =0 рассогласование в системе как по частоте, так и по фазе отсутствовало, т.е. Af{t)=Q и Аф(0=О Рис. 1.31 при <0, а в момент времени =0 частота сиг- нала начала изменяться и возникло частотное рассогласованиеТА/()=70 при >0, т. е. /с(0=7/о(0 Для tO. Представим напряжения и как это принято в электротехнике, в виде векторов, вращающихся со скоростью Q=2nf и Qo==2n/o (рис. 1.31). Тогда скорость вращения вектора относительно вектора оп, с одной стороны, как следует из рис. 1.31, равна Q=dA(p/dt, а с другой - Q=Q(.-Qo==2n(/c-/о)=2пА/. Таким образом, = 2пА/, откуда, интегрируя, случаем Аф!()=2яА/(/)Г. (1.82) Следовательно, фазовый сдвиг между двумя гармоническими колебаниями пропорционален интегралу по времени от разности частот этих колебаний. Поэтому, если в качестве входной величины фазового дискриминатора рассматривать не фазовый сдвиг, а разность частот напряжения сигнала и опорного напряжения то фазовый дискриминатор представляет собой интегрирующий частотный дискриминатор . Найдем передаточную функцию дискриминатора для этого случая. На основании (1.82) и (1.81) имеем откуда т. е. фазовый дискриминатор, используемый как частотный дискриминатор системы фазовой автоподстройки частоты, является инерционным интегрирующим звеном. Угловые дискриминаторы. Угловые дискриминаторы систем автоматического сопровождения по направлению движущихся объектов предназначены для обнаружения отклонения равносигнального направления следящей а]1тенны от направления на объект и преобразования этого отклонения в постоянное или переменное напряжение. 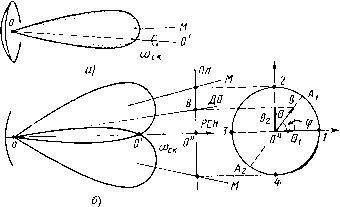 Рис. 1.32 В зависимости от способа формирования равносигнального направления угловые дискриминаторы систем АСН подразделяют на две группы: 1) дискриминаторы с последовательным сравнением сигналов, или дискриминаторы с интегральным равносигнальным направлением; 2) дискриминаторы с одновременным сравнением сигналов, или дискриминаторы с мгновенным равносигнальным направлением. Рассмотрим дискриминатор с последовательным сравнением сигналов. Угловой дискриминатор с последовательным сравнением сигналов. Если излучатель антенны привести во вращение с постоянной угловой скоростью сйк вокруг оси 00, направление которой не совпадает с электрической осью антенны, то, как видно из рис. 1.32, а, ось максимума излучения будет описывать в пространстве коническую поверхность, а диаграмма направленности будет вращаться (сканировать) с угловой частотой а. На рис. 1.32, б показаны два крайних положения сканирующей диаграммы в плоскости чертежа, разделенные интервалом времени, равным половине периода сканирования. Пересечем пространственную диаграмму направленности плоскостью Ял, перпендикулярной оси вращения, как показано на рис. 1.32,6. Пусть О - точка пересечения оси вращения с этой плоскостью. В процессе сканирования ось максимума излучения описывает на этой плоскости окружность с центром в точке О . Пусть В - точка пересечения этой плоскости с направлением на объект. Если точка В не сов-
|