
|
|
|
Главная -> Области применения постоянного тока 6.20. ПРИНЦИП ДЕЙСТВИЯ МУ Для выяснения принципа действия МУ рассмотрим зависимость тока / рабочей цеви от степеии подмагничивания магнитопроводов постоянным током управления 1у Будем считать сначала, что потери мошности а магнитопроводе, потоки рассеяния и активные сопротивления рабочих обмоток и потребителя равны нулю. На основании известных соотношений для ндеализнрованной катушки с ферромагнитным магнитопроводом можно утверждать следующее. Если- напряжение источника изменяется по закону а= t/ sin(tu( + л/2), то при сделанных допущениях е, =2= - м = £ sin(o)t - =Ф 8шо)г + Фо; Ф2 = Ф ЗШ0)Г -Фд, где Фд - постоянная составляющая магнитных потоков; при отсутствии подмагничивания постоянным током (/ = 0) Ф = 0. Следует обратить внимание на то, что при сделанных допущениях амплитуда магнитных потоков Ф зависит исключительно от значй1ия иапряжйгия источника н)еменного тока и, в частности, не зависит ог степени иодаагннчивання магнитопроводов постоянным ТОКОМ. Для построения графика рабочей цепи МУ необходимо иметь графики Oi(() и Фг!)- также магнитные характеристики Oi(Fi) и г{2\ Д 1 и F2 - результирующие МДС обмоток, расположенных на первом и втором магнитопроводах. Графики Ф, (() и Ф2(г) можно построить по привеленным вьшге к*ражениям. Для построения магнитных хартктертстик необходимо произвести растет \шгвнтной цепи. На ptK. 6.41 приведены графики j{Fi\ liiX также графики гЩ f i(0 и 2(0 для случая, котда подмагвичивание магнитопровода отсутствует (Ф - 0). Построение графиков F, (l) и Fi(f) производится в таком порядке. Задаемся, например магнитным потоком Ф\ = Фг = Ф, после чего по графику Ф1 (О находим время t, а по графику Ф1 (F,) - МДС F\ = F2 = F; в системе координат Fj, ( при вре-меви t откладываем МДС F\. Когда подмагничииание магнитопроводов отсутствует, f, =iw и Fj=/2*- С.южив МДС. получим Fi + = (i, +/2}>*- Но г, + Г; поэтому + = 1и, откуда i = (F + F;)/ - Как видно, ток i рабочей цепи пропорционален сумме МДС. Сложив МДС F, и 2 при различных значениях времени, получим график 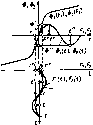 Рис. 6.41. К построению графика тока рабочей цени МУ прн = О и Фа - О 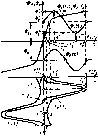 Рис. 6.42. К построению графика тока рабочей цепи МУ при /у # О и Фо О 1 + 2 =ЛИ. представляющий собой в другом масштабе график тока i(t). Графики Ф1 (F), Ф2 (F2), а также графики Ф, ((), Фг (f), Fj (() и Fj (г) при подматничиванин магнитопроводов постоянным током приведены на рис. 6.42. Построение [рафикга F,(t) и Fit) производится в порядке, изложенном выше. При подмагничивании магнитопроводов F, = = iW + lyWy и F2 - iw - /уиу После сложения МДС получим Fj-1-F, =(ti+(2)w = w, откуда, как и раньше, i = iF +F2)/*v. График Fi 4- Fj = /W на 1жс. 6.42 в доугом маатабс представляет собой график тока i{t). Сравнивая графики i{t) МУ без подмагничивания и с под-магничиванием, видим, что во втором случае максимальное значение тока / згаетно больше. Наибольшее значение максимального тока получается тотда, когда магнитопроводы полностью насыщены в течение всего периода изменения потоков. Если несннусоидальный ток j рабочей цепн заменить эквивалеитным синусоидальным током, то последний будет сдвинут по фазе отиоснтельно напряжения источника на 90. Учитывая это, рабочие <мотки можно }иссматривать как элементы, ни ющие некоторое индуктивное сопротивление х, связанное с действующими значениями напряжения и эквивалентного синусоидального тока рабочей цепн соотношением = U/I. Значение сопротивления Xq при данном напряжении источника зависит от степени подмагничивання магнитопроводов постоянным током. Прн /у = О сопротивление Xq будет наибольшим. Наименьшее сопротивление получим прн таком токе 1у, прн котором магнитопроводы оказываются полиостью насыщенными в течение всего периода изменения потоков. Еслн в цепь рабочих обмоток включить приемник электрической энергии, то, изменяя с помощью тока управления индуктивное сопротивление Хо, можно менять ток, напряжение и мощность потребителя. Расчет МУ производят обычно таким образом, чтобы при отсутствии подмагничивання амплитуда магнитных потоков была наибольшей, но чтобы магнитопроводы не были насыщены в течение всего периода изменения потоков. С целью уменьшения тока i приемника при /у = О, а также тока 1у, необходимого для перевода магнитопровода в полностью насыщенное состояние в течение всего периода изменения магнитного потока, магнитопроводы МУ изготовляют, обычно из ферромагнитного материала с прямоугольной петлей гистерезиса (см. рис. 6.43, а) и стремятся свести к минимуму воздушные зазоры в магнитопроводе. 4.21. СООТНОШЕНИЯ МЕЖДУ ТОКАМИ И ХАРАКТЕРИСТИКА УПРАВЛЕНИЯ МУ Для анализа и расчета электрических цепей, содержащих МУ, применяются два метода. Первый из ннх основан на использовании в. а. x., связывающих действующие значения эквивалентного синусоидального напряжения и тока рабочей цепи при различных токах упра вления. Этот метод дает достаточно точные результаты, но отличается громоздкостью и не позволяет получить простых аналитических соотношений, пригодных для анализа и расчета электрических цепей. Второй метод основан на замене реальной прямоугольной петли гистерезиса (рис. 6.43, а) идеализированной петлей (рис. 6.43,6), которой соответствуют средняя кривая намагничивания и магнитная характеристика, приведенные на рис. 6.43, в и г. Такая замена позволяет получить относительно простые аналитические соотношения, хорошо совпадающие с опытными данными. В теории магнитных усилителей доказывается, что в случае идеализированной петлн гистерезиса при параллельном соеди-пепии рабочих обмоток (см. рис. 6.36) между средним значением тока приемника и током управления существует соотношение (6.45) Рис. 6.43. Кривые намагничивания и магнитная характеристика т. е. среднее значение тока приемника прямо пропорциональио току управления. Приведенное соотиошеине справедливо до тех пор, пока при увеличении тока 1у ток /.р не достигнет наибольшего значения hpmax- Это Произойдет при таком токе 1у ах-> при котором сердечники будут насыщены в течение всего периода изменения питающего напряжения, л нндуктнвиое сопротивление рабочих обмоток станет равным нулю. Если учесть, что ток рабочей цепи изменяется при этом примерно по синусоидальному закону, н считать, что активное сопротивление рабочих обмоток намного меньше сопротивления потребителя (гГп), то ток hpmax МОЖНО опредслить слсдующим образом; где t/ep и с/ - среднее и действующее значения напряжения источника переменного тока. Ток прн котором появляется ток /ср , будет равен IV 0,5[/cpiv 0,5C/W /, -0,5/,р -- При > ток /ер будет оставаться постоянным и равным /cpwn-v Зная ток hf, легко определить напряжение на приемнике: C/.,cp-Vn- При /у = Lax среднее напряжение потребителя достигает наибольшего значения и прн г г практически равно среднему напряжению сети: 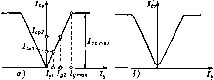 стики. управления (см. рис. 6.44, а) таким образом: Рис. 6.44. Характеристики управпения МУ Важнейшей характеристикой МУ является характеристика управления, представляющая собой зависимость между токами /ф и 1у. Характеристика управления МУ, построенная в соответствии с (6.45) и замечанием в отношении наибольших значений Icpmax н 1у а, приведсиа из рнс. 6.44, а. Изменшие направления тока 1у НС оказывает влияния на ток рабочей цепи, поэтому характеристика Ip {Iy) симметрична относительно оси ординат. Прн изменении напряжения U или сопротивления г будет соответствующим образом изменяться ток /срал:, а также ток Вследствие того что кривая намагничивания ферромагнитных материалов отличается от идеализированной, а также из-за потоков рассеяния характеристика управления реального МУ (рис. 6.44,6) несколько отличается от рассмотренной. Однако если магнитопровод МУ выполнен из материала с прямоугольной петлей гистерезиса, то характеристики отличаются незначительно н практически можно пользоваться идеализированной характеристикой управления рис. 6.44, а. Следует отметить, что при О < < / форма кривой тока рабочей цепи i{t) МУ сушествеиио несннусоидальна. Оиа зависит от способа соединения рабочих обмоток, значения сопротивления цени управления и может быть весьма разнообразной. 6.22. КОЭФФИЦИЕНТЫ УСИЛЕНИЯ МУ Одними из важнейших величин, характеризующих усилители, являются их коэффициенты усиления. Различают коэффициенты усиления по току, напряжению и мощности. Коэффициент усиления МУ по току представляет собой от-пошепие приращения тока приемника к приращению юка управления. Он может быть определен с помощью характери- v2 ~ vl (6.47) Еати считать характеристику управления идеальной и заменить в (6.47) и /ср согласно (6.45), то получим к- = 2Wy/w. (6.48) Как видно, коэффициент уснлеиия по току есть величина постоянная для данного МУ. Коэффициент усиления МУ по напряжению представляет собой отношение приращения напряжения приемника к приращению напряжения обмотки управления: AU, r,(/,2-/,i) г/ Если заменить Аг, согласно (6.48), то Кроме зависимости от параметров МУ коэффициент усиления по напряжению зависит от сопротивления г, приемника и возрастает при его увеличении. Коэффициент усиления МУ по мощностн представляет собой отношение приращения мощности приемника к приращению МОП1НОСТИ обмотки управления: Если заменить средние токи приемника токами управления согласно (6.45), то 4iv/r Коэффициент усиления к, зависит как от параметров МУ, так и от сопротивления приемника. При увеличении коэффициент усиления возрастает. Коэффициенты усиления по мощности МУ, выполненных согласно рис. 6.40, доходят до 2(Ю.
|