
|
|
|
Главная -> Источники электропитния 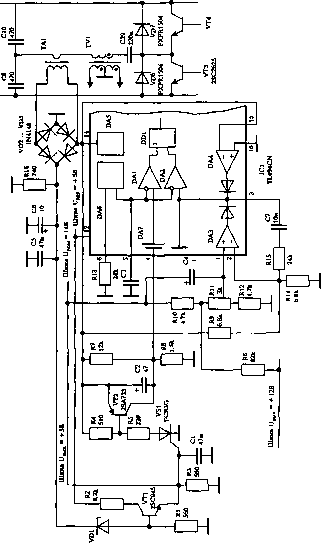 IS а X! О IC1. Возрастание тока нагрузки одного из сильноточных каналов приводит к увеличению ширины управляющих импульсов и повышению напряжения на конденсаторе Сб. При превышении этим напряжением уровня +5,1 В стабилитрон VD1 открывается и в базу транзистора VT1 проходит ток по цепи: положительный вывод конденсатора С6; стабилитрон VD1; переход база-эмиттер транзистора VT1; резистор R3; корпус. Транзистор VT1 открывается и в управляющий электрод тиристора VS1 течет ток по цепи: шина электропитания +14 В; резистор R2; переход коллектор-эмиттер транзистора VT1; управляющий переход тиристора VS1; корпус. Тиристор открывается и ток через резистор R5 в базовой цепи транзистора УТ2 переводит этот транзистор в открытое состояние. Открытый транзистор VT2 замыкает выводы 14 и 4 микросхемы управления, что приводит к отключению источника электропитания. Защита от перенапряжений на выходе канала +5 В осуществляется схемой, содержащей стабилитрон VD1 и резистор R3. Когда напряжение шины Uref превышает значение +5,1 В, стабилитрон VD2 пробивается и тиристор VS1 открывается. Это приводит к открыванию транзистора VT2 и защитному отключению. В данном случае не используется ограничение ширины управляющих импульсов, поэтому на вывод 15 микросхемы управления (инвертирующий вход усилителя ошибки DA4) подается напряжение шины Uref, а вывод 16 (неинвертирующий вход DA4) соединен с корпусом. В рассматриваемой схеме стабилизация выходных напряжений осуществляется только по каналам +5 и +12 В. Между шинами выходных напряжений +5 и +12 В включен делитель напряжения R6, R10. Напряжение от средней точки этого делителя подается на делитель R11, R12. Таким образом, сигнал обратной связи на неинвертирующий вход усилителя ошибки DA3 складывается из отклонений двух напряжений. Поэтому отклонение напряжения любой из шин (+5 или +12 В) изменит напряжение в средней точке делителя R6, R10 и, следовательно, изменит сигнал обратной связи с резистора R11 на усилитель ошибки. Схема вентилятора В состав источника электропитания ПЭВМ входит вентилятор для принудительного охлаждения самого датчика и электронных средств системного блока. Вентилятор выполняется на базе бесколлекторного вентильного двигателя постоянного тока с внешним ротором. Коллекторный двигатель постоянного тока в составе ПЭВМ не применяется, так как его щеточный узел является источником электромагнитных помех и требует проведения регламентных работ в связи с износом щеток. В большинстве схем источников электро- питания для двигателя используется входное напряжение +12 В, в некоторых случаях электропитание на двигатель подается от шины минус 12 В. Потребляемый вентилятором ток равен примерно 0,12 А. На роторе бесколлекторного двигателя размеш;ены постоянные магниты, создаюш;ие поток возбуждения, а на статоре расположены обмотки. Для обеспечения угла сдвига 90 градусов между потоком возбуждения магнитов и намагничиваюш;ей силой обмоток переключение обмоток статора производится в определенные моменты времени и с заданной последовательностью. Положение ротора определяется при помощи датчика Холла, который управляет работой электронных ключей. Электрическая схема вентильного двигателя SU8025-M показана на рис. 3.58. Датчик Холла HG управляет транзисторами VT1 и VT2, которые работают в ключевом режиме и находятся в противоположных состояниях. Обмотка статора состоит из четырех катушек. В зависимости от положения ротора с вывода 3 датчика Холла HG поступает управляющий сигнал низкого или высокого уровня. При сигнале высокого уровня транзистор VT1 открыт, а транзистор VT2 закрыт и через обмотки фазы А протекает ток возбуждения. При повороте ротора вектор магнитной индукции поля ротора также поворачивается и меняет свое направление, в результате чего с вывода датчика HG подается сигнал низкого уровня, которым закрывается транзистор VT1 и открывается транзистор VT2. При этом ток возбуждения будет проходить через обмотки фазы В. Вращение ротора продолжается после переключения транзисторов в том же направлении. 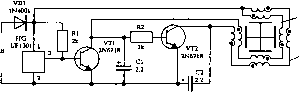 Рис. 3.58. Схема вентильного двигателя типа SU8025-M При коммутации транзисторов импульсные токи через обмотки вызывают перенапряжения, которые определяются индуктивностя-ми этих обмоток. Для снижения уровня перенапряжений параллельно переходам коллектор-эмиттер транзисторов включены кон-
|