
|
|
|
Главная -> Управляемый электронный аттенюатор = Pit/ (p < 1), обеспечивают лишь требуемые интервалы изменения управляющего воздействия i-ro диода. Следует иметь в виду, что принципиально управление током и напряжением дает различные результаты в отношении точности сопряжения. Это объясняется нелинейной зависимостью характеристик управляемых нелинейных элементов J = f{u), исключающей пропорциональное изменение Ri при управлении по двум независимым переменным /, и. Остановимся подробнее на случае использования одинаковых диодов в схемах, где точное сопряжение не вы- 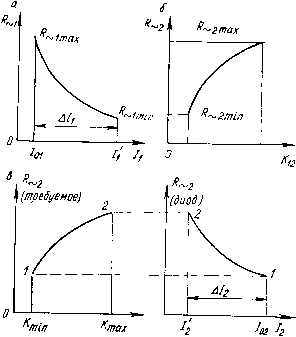 Рис. 2.9. полняется. Можно предложить следующий порядок расчета требований к цепям управления диодов, уменьшающий ошибку сопряжения. Для выбранной структуры УЭА (см. рис. 1.6, и, а также табл. 2.2) определяется элемент, сопротивление кото- рого должно меняться в наиболее широких пределах, что требует использования вольт-амперной характеристики диода в наиболее широкой области, которая, однако, не должна выходить за пределы допустимой (см. § 1.5). На рис. 2.9, а показаны характеристика Ri, исходный ток /qi и амплитуда управляющего тока А/ = /1 - /щ. В соответствии с табл. 2.2 находим требуемый закон изменения R2-Пусть этот закон соответствует рис. 2.9, б. Выбираем на характеристике диода R2 = / (/) исходный ток 1, обеспечивающий точное сопряжение в точке Кш1п< т. е. при /?~2min (точка 1). Пересекая кривую R2 = / (О диода горизонталью на уровне /?~2тах, получим значение тока /г, обеспечивающее точное сопряжение в точке 2 (рис. 2.9, в). Очевидно, для перевода рабочей точки на характеристике второго диода из положения / в положение 2 необходимо изменить величину тока 1 в пределах Д/2== /2-/02- Сравнивая Д/а и A/j, получаем, что для этого надо разделить управляющий ток / в рг раз, где рз = < 1 (предположим, что А/а < A/i), тогда р = 1, т. е. A/i=/. Совмещенные характеристики: требуемая (а) и реальная (б), представленные на рис. 2.10, дают представление о степени близости законов изменения R. Выбрав точки точного сопряжения / и 2 в других местах рабочего диапазона, можно уменьшить погрешность сопряжения (рис. 2.11). Для этого надо изменить исходное смещение на характеристике диода (б) и размах управляющего воздействия. Оптимальное положение точек 1 я 2 можно определить путем графического построения вариантов рис. 2.11 или расчетным путем, минимизируя средний квадрат разности R - Rxpeu т. е. величину 1> Рис. 2.10. М= J (/?-/?.реб)Л. 2m in Пределы интегрирования связаны с варьируемыми при 35 минимизации по избранной стратегии сопротивлениями R2, В работе [1] предложен другой принцип приближенного сопряжения законов изменения Rc, основанный на уравнении управляющих диодами токов вида = / = const. (2.10) 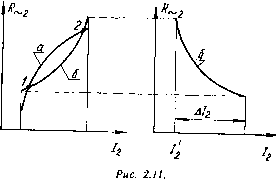 Пусть, например, для Г-образного УЭА (см. рис 1 6 в) в соответствии с выражением (2.5) R2 = 1/уи, тогда, согласно уравнению (2.10), = 1/ (/,-/). Подставив зависимости Ri в уравнение для F {У V) = О (см. табл. 2 2) получим 2 {yRoY+i2a+ 1=0, (2.11) a = Y/?o-(YW. (2.12) Нетрудно заметить, что уравнениям (2.11)-(2.12) можно удовлетворить предельно в двух точках, т. е. при /jmin и /ап1ах> обеспечивающих точное сопряжение в этих точках. Требуемые точки сопряжения могут быть подобраны за счет соответствующего выбора величин Ro и /. Как будет показано далее, в § 2.2, для уменьшения нелинейных искажений в УЭА можно использовать соединения диодов, например вместо - п диодов, включенных последовательно, вместо R2 - fn диодов, включенных параллельно. Тогда откуда, используя табл. 2.2, будем иметь il (Y/?o) + .P + - = 0, где = myRo-(yRo)4. Выбирая дополнительно число диодов m и и, можно варьировать точками точного сопряжения в широких пределах. Окончательный выбор структуры УЭА, удовлетворяющей условию неизменного 7?Bx=i?o, вида управления (по току или напряжению) и точек сопряжения следует производить после проверки степени фактического изменения вх и главным образом допустимой деформации АЧХ (ФЧХ) тракта при регулировании (см. гл. 3). Как будет показано ниже, в § 2.2, иногда нелинейные резисторы целесообразно выполнять в виде комбинации последовательного или параллельного соединения диода и линейного резистора R. При экспоненциальной характеристике диода последовательное включение резистора с величиной R увеличивает сопротивление цепи до 31 = * yJ t2], при параллельном соединении умень- шает до R = i yj > где i - ток во внешней цепи нелинейного элемента. В результате усложнения способа выполнения управляемого резистора изменяется функциональная связь Ri и управляющего тока i, что дает дополнительную возможность повысить точность конечного сопротивления эквивалентного управляемого элемента при минимальном или максимальном токе диода. Существенная необходимость в точном выполнении сопротивления при малом значении Ki2 возникает прежде всего в мостовой схеме (см. рис. 1.6, к), так как это определяет допустимую глубину регулирования. Последовательное включение следует использовать тогда, когда требуется стабилизировать минимальную величину Rri, так как при максимальном токе диода R. По мере уменьшения тока эта величина возрастает (см. рис. 2.7, д), стремясь к ?~тах+?. Параллельное включение, наоборот, следует применять при необходимости стабилизировать максимальное сопротивление Ri, что достигается при минимальном токе диода. При увеличении этого тока сопротивление Ri падает, стремясь к минимальному сопротивлению диода. Во всех случаях точность величины R.i в одном из крайних значений регулирующего тока приближенно определяется точностью линейного резистора R. Нетрудно показать, что точность сопротивления R-Ro при Ki2 -* О для мостовой схемы, представленной на рис. 1.6,/с, обеспечивает минимальное значение К12 и, следовательно, Ощах- Действительно, для этого случая из табл. 2.2 следует 7 Rq - R 1 где при Ki2 О R\ -> Rf). Однако из-за разброса величины коэффициент Ki2 приобретает среднеквадратичное отклонение от нулевого значения Ki- 1.2. НЕЛИНЕЙНЫЕ ИСКАЖЕНИЯ В УЭА 2.2.1. Метод определения нелинейной передаточной характеристики УЭА Анализ нелинейных искажений (НИ) в УЭА удобно проводить, рассчитав его нелинейную передаточную характеристику, т. е. функциональную связь входного воздействия е (Ui) и отклика на него U2 (см. рис. 2.1). Для случая, когда инерцией элементов тракта можно пренебречь, передаточная характеристика представляет функцию L2=/i(e), которую можно представить различными способами. Известно, что для приемно-усилительных трактов широко применяется представление передаточной характеристики с помощью степенного ряда (2.13) Для входных воздействий, не выводящих нелинейные элементы анализируемого тракта в режим существенной нелинейности вида отсечки, ограничения и т. п., допустимо ограничиться тремя членами ряда (2.13) [11]. Пользуясь коэффициентами а* , можно получить такие общепринятые критерии нелинейности, как: 1) частные коэффициенты гармоник: по второй гармонике 2 ad) где Um - амплитуда входного сигнала; по третьей гармонике 4 ffiCD 2) коэффициент перекрестных искажений . (3) (2.14) (2.15) (2.16) где Umao - амплитуда немодулированного колебания помехи; /Пс, /Пп - коэффициенты глубины модуляции сигнала и помехи;
где t/mi, [/m2 - змплитуды колебаний помех с частотами W1 и (02; С/тс - амплитуда колебания сигнала; 4) коэффициент гармоник огибающей 9 2 (3 где т - коэффициент глубины модуляции; Uma- амплитуда немодулированного колебания. Нелинейные критерии, обусловленные кубическим и квадратичным членами ряда (2.13), связаны между собой однозначными зависимостями, что позволяет по одному из известных критериев находить другие. Например, при Uml-m2=Umc, ШаШс, т=\ При расчете НИ в УЭА целесообразно учесть его назначение в конкретном приемно-усилительном тракте.
|