
|
|
|
Главная -> Управляемый электронный аттенюатор /? = г, = . или R = ae-i . (2.5) где a = Расчеты показывают, что значение Dmar для схем рис. 2.3 на диоде в пределах рабочего диапазона, используемого в УЭА, составляет примерно 30 дБ. Для повышения эффективности регулирования используют многоэлементные регуляторы с несколькими 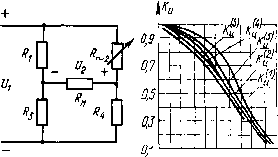 ff.mU,25 0.1 0,5 2 Ю ifJ Рис. 2.5. Рис. 2.6. различно включенными управляемыми элементами (см. рис. 1.6, (Э, е, 3, и, к) или каскадирование звеньев вида, представленного рис. 2.3, на однотипных элементах с одним регулируемым элементом (см. рис. 1.6, а, б). В первом классе УЭА имеется возможность удовлетворить в каждом звене дополнительные требования к УЭА, например неизменность входного и выходного сопротивлений в процессе регулирования, однако в последнем случае требования к цепи управления нелинейных элементов при этом ужесточаются. Примером высокоэффективной схемы УЭА этого класса является мостовая схема (рис. 2.5), позволяющая при относительно небольшом изменении нескольких (в пределе одного) резисторов получить значительные изменения коэффициента передачи K\2=U2/\- Нетрудно показать [24], чтп 1+- + Для случая предельного значения /Ciamax, когда необходимо удовлетворить неравенствам Rz<R\ и /?з<Лн, 1-1-рЯ~т>п 7 откуда следует, что К стремится к нулю при р = = 1?4(~т!пз)~- Таким образом, теоретическое значение Dmax мостовой схсмы стремится к бесконечности, однако на практике из-за трудности долговременной точной балансировки моста и главным образом вследствие влияния реактивных элементов в схеме рис. 2.5 нулевая передача не достигается. Величина Д ах при этом оказывается в области умеренно высоких частот достаточно большой (50-60 дБ и более). Во втором классе УЭА управление нелинейными элементами упрощается, однако эти схемы не могут обеспечить неизменность входного сопротивления. Каскадируя однотипные звенья, можно получить значительные величины Dmax, однако при сопутствующей потере в начальной передаче Ктаи, величина которой возрастает с ростом числа звеньев. Для одного звена схемы рис. 1.6, б [33] Л12 = для одного зве а, но с учетом влияния на него последующего второго звена для одного звена, но с учетом влияния на него последующих двух звеньев К\2 - и т. д., где Y = Ri/R2- На рис. 2.6 приведены характеристики Кц одного звена для различного числа последующих звеньев (г = 2 - 5) в функции относительного изменения сопротивления R2- Как следует из рис. 2.6, изменение Кц при учете последующих звеньев незначительно, что позволяет в первом приближении не учитывать этот эффект. 2.1.2. ДИАПАЗОН РЕГУЛИРОВАНИЯ КОЭФФИЦИЕНТА ПЕРЕДАЧИ УЭА С НЕИЗМЕННЫМ ВХОДНЫМ СОПРОТИВЛЕНИЕМ Неизменное входное сопротивление УЭА, нагруженного на вещественное в рабочем диапазоне частот сопротивление Ro, можно обеспечить лишь в многоэлементных схемах, показанных на рис. 1.6, в-е, и, к. Дополнительно необходимо согласовать законы изменения управляемых сопротивлений в функции коэффициента передачи аттенюатора К12 или управляющего воздействия Я,. В табл. 2.2 приведены соответствующие законы изменения величин Vi = RiIRo в функции Кц и их взаимосвязь 12). обеспечивающие входное сопротивление УЭА, равное Rq. Таблица 2.2 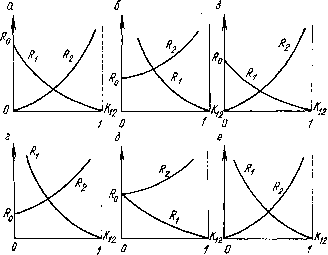 Рис. 2.7. Качественные зависимости R{ = / {К12) приведены на рис. 2.7 (а -для схемы рис. 1.6, в; б -для схемы рис. 1.6, г; в - для схемы рис. 1.6,5; г - для схемы рис. 1.6, е; d - для схемы рис. 1.6, к; е -для схемы рис. 1.6, ы). Из рис. 2.7 следует, что значения Ri для всех схем изменяются монотонно, падая или нарастая. Пределы Схема Рис. 1.6,в Рис. 1.6, г Рис. 1.6, д, 2i = Z, 1ис. 1.6, е, Z, = Z, 1ис. 1,6, и, Z:i - Z - Rq Рис. 1.6, к, Z, = 2з, 2, = 2, 2- V, V,~] 1 -1/ V -1 = 0 = 0 = 0 Пределы изменения 0 < 11 < 1 1 < Vi < 00 1 < l/j < 00 0 < Kj < 00 0 -< < 00 изменения P,-, требуемые для изменения К от О до 1, различны: от О до оо, от /?о ДО О и от Ро до оо. При этом каждому значению коэффициента передачи при заданном Ро соответствует сопряженная пара сопротивлений Rn..i и R2- Очевидно, что для обеспечения требуемого закона сопряжения необходимо подобрать законы управления соответствующих R.i. Таким образом, управляющие токи или напряжения каждого элемента должны изменяться так, чтобы обеспечить при каждом значении К из рабочего диапазона соответствующие величины Rt (см. табл. 2.1). Строгое соответствие этому правилу можно обеспечить в двух случаях. Во-первых, при использовании нелинейных элементов с требуемыми характеристиками вида рис. 2.7, где величину /С12 необходимо заменить управляющим воздействием X, при этом все нелинейные элементы управляются одинаковыми воздействиями /у, пропорциональными Кц. В этом случае совмещение требуемых законов осущест- 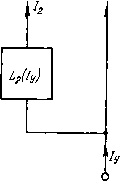 вляется соответствующим выбором исходных управляющих токов /о или напряжений Ug, удовлетворяющих уравнениям табл. 2.1 хотя бы при одном значении Кц- Во-вторых, при использовании нелинейных элементов, строго не удовлетворяющих условиям сопряжения, однако управляемых различными подобранными воздействиями {Ui) и 1 (t/g), связанными определенными функциональными нелинейными связями с основным воздействием /. Таким образом, необходимо, чтобы /1 = /i {Ij), Rri== = h(li), где I = Li{I),I== = La(y) были подобраны такш* образом, чтобы Rr\ = /i [Lj (/у) и R.2 = fi[Li(ly)] удовлетворяли равенству F (Vj, l/j) = О в табл. 2.2. Очевидно, можно положить, что Li = l, тогда R\=fi iy) а -2= Структурная схема нелинейного управления для пары сопряженных нелинейных элементов приведена на рис. 2.8. Хотя успехи в создании микро-электроиных структур с требуемыми нелинейными свойствами, по-видимому, со временем позволят практически реализовать два вышеупомянутых варианта сопряжения законов изменения Ru однако применение их в настоящее время пока встречает известные трудности. Можно показать, что при использовании диода с характеристиками на рабочем участке вида Рис. 2.8. i = /o(£V l) (2.6) при одинаковом управляющем воздействии строго не обеспечивается удовлетворение условию F(V[, V2)=0 в табл. 2.2 [9]. Исключение составляют случаи мостовых.: аттенюаторов, представленных на рис. 1.6, и, к. Действительно, предположим, что для этого случая исходные напряжения для каждого из одинаковых управляемых диодов выбраны соответственно Uoi и U02 и удовлетворяют требуемой паре некоторых сопряженных сопротивлений. В соответствии с выражениями (2.5) й (2.6) где iy-управляющие напряжения. Перемножив иЯ~2 и положив, что диоды управляются одним источником и[ = и2 = и, но включены относительно него в противоположной полярности (Ui > О, (72 <0), получим RiR2 = ae-t (..-.о, (2.7) Сравнивая соотношение (2.7) с законом сопряжения в табл. 2.1 для мостовых УЭА, получим, что соотношение (2.7) удовлетворяет этому закону во всем диапазоне регулирования, где справедлива аппроксимация вида (2.6), при этом При условии [/о1= It/oal имеем Ro = (2.8) (2.9) Нелинейные элементы с экспоненциальными характеристиками обладают свойством удовлетворять условию неизменности входного сопротивления УЭА, нагруженного на сопротивление ?о. Величина входного сопротивления, равного Ro, может подбираться в соответствии с формулами (2.8), (2.9). Нетрудно показать [9], что, используя параллельное соединение п одинаковых диодов вместо Ri и R2, можно получить неизменное входное сопротивление, равное l/nylp, а принимая число диодов в ветвях /ii и п: Ro= \lYппу!. Таким образом, представляется возможность синтезировать УЭА мостового типа, неизменное входное и нагрузочное сопротивление которых может варьироваться в достаточно широких пределах. Для УЭА других видов сопряжение законов изменения Ri возможно лишь приближенно. Используемые в этом случае на практике принципы управления от одного источника тока / или напряжения U, включенного к г-му нелинейному элементу по постоянному току непосредственно или с применением линейного делителя, т. е. = или
|