
|
|
|
Главная -> Управляемый электронный аттенюатор управления при питании постоянным током работа происходит в НЧ режиме, где оказывается справедливым соотношение (1.6). Для цепи сигнала при работе в режиме ВЧ р-t-п диод проявляет себя как управляемый резистор. Варикапы - полупроводниковые управляемые конденсаторы. В качестве варикапа может быть использован диод при работе на обратной ветви его ВАХ. В этом режиме для управляемого конденсатора используется барьерная емкость р-п перехода Cj. Зависимость Cj{u) может быть аппроксимирована: Cj = где А - постоянная, зависящая от свойств полупроводникового материала и геометрических размеров; Uk - контактная разность потенциалов. Показатель п определяется видом р-п перехода. Различают переходы: линейный (п = 0,33), резкий (п = 0,5) и сверхрезкий (п1). Для всех видов ПТ в ненасыщенной области стоковых характеристик канал не перекрыт, и ПТ проявляет свойства резистора, управляемого напряжением затвор - исток Ыз.и [35]. Для идеального ПТ или внутреннего (ВТ) начальный участок стоковой ВАХ, соответствующий ненасыщенной области, может быть аппроксимирован уравнением ( з.и - о) си - (1.8) где Uo - напряжение отсечки проходной характеристики 1с = /(из.и); си - напряжение между стоком и истоком; Р - постоянный коэффициент, зависящий от конструкции ПТ и свойств материала полупроводника. Для ПТ с р-п переходом и МДП со встроенным каналом 2 где /со - ток стока насыщения при из.и = 0. Выражение (1.8) справедливо и при инверсном включении ПТ, когда сток и исток меняются местами. 2. УЭА КАК УПРАВЛЯЕМЫЙ ЧЕТЫРЕХПОЛЮСНИК 1.1. ДИАПАЗОН РЕГУЛИРОВАНИЯ КОЭФФИЦИЕНТА ПЕРЕДАЧИ УЭА И СПОСОБЫ ЕГО РАСШИРЕНИЯ 2.1.1. Определение диапазона регулирования коэффициента передачи УЭА Как было отмечено в гл. 1, важнейшей характеристикой УЭА является модуль относительного изменения коэффициента передачи, эквивалентного аттенюатору четырехполюсника без учета K\2=02/Ui (рис. 2.1) и с уче- 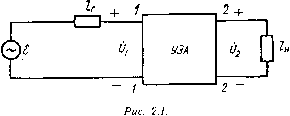 том {/г/е сопротивления источника (сквозной коэффициент передачи), т. е. D = -4; р итах При разработке УЭА необходимо: определить К для конкретной схемы УЭА; найти предельное значение D (Dma-s.), обусловленное возможными на практике пределами изменения управляемых величин. Величина К]2 или К в общем случае зависит от структуры УЭА, т. е. способа соединения его линейных и нелинейных компонентов, диапазона изменения параметров регулируемых элементов, величин нерегулируемых элементов, а также сопротивлений источника сигнала 2г и нагрузки Z . Тогда 12 = fl (-г. н. 2;о. -Zi-); = fa (г> и> iO. 2;), где Z,-o, Z;. - сопротивления соответственно постоянных и переменных резисторов в УЭА. Так как Zc являются функциями управляющего воздействия (тока или напряжения), т. е. 2; = фДХ), то /С и /Си -также функции Я. При изменении величины к в допустимых пределах а: {Кц) изменяется в пределах К (Ciamai) - min(iamin)- Выражения для коэффициентов передачи УЭА по его схеме замещения можно получить с помощью известных методов теории линейных электрических цепей: =--- (2.1) yi2>2l2rZ - (1 + KuZr) (1 + KsjjZh) где Yih - комплексные У-параметры четырехполюсника, эквивалентного УЭА. В табл. 2.1 даны выражения для расчета D некоторых встречающихся на практике структур УЭА [6]. Приведенные в ней схемы являются схемами замещения для переменного тока; 2дгтах, 2д,т1п- максимальные и минимальные комплексные сопротивления i-x регулируемых элементов; в том случае, когда они одинаковы и работают при одном управляющем воздействии, индекс t опущен. 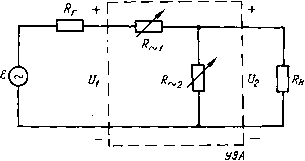 Рис. 2.2. Для уяснения закономерностей работы УЭА и способов расщирения Dmax рассмотрим некоторые простейшие схемы, полагая для простоты, что в интересующем диапазоне частот все элементы УЭА, а также сопротивления 2г и Zb резистивные, т. е. Zr = i?r, Zu=Rh.- Например, для двухэлементного УЭА (рис. 2.2) Таблица 2.1 Структурная схема УЭА =н<н>н (0)£ A,iLMj> If д, =ЬЧ<3- Величина D Zr-fZH 2 + 4±£ 2дш1п (Zr -f Z )+ Zjmax{Zr-i-2 )-b2ZrZ Zд2min Zh + Zr + Zjimin Окончание табл. 2.1
Zr -f~ дат1п Zr + 2д1т]п (2.2) l+(/?r + ?~l)(0 + G~2) где G2= l ?~2; G = l/i? , откуда [24] Kmin l + (?r + ?~lmIn)(G + G~2min) / Выражения (2.2), (2.3) можно упростить для практически выполняемых условий RrXmlnRr, 02т!п<Си. ТОГДЗ тах ~ (1 Ь гн) > mln ~ ~2mln~lmax; i5i?,n,ax/?l2min(l + ). Для более простой схемы -с одним последовательно включенным регулируемым резистором (рис. 2.3, а) Сах = [1 + (G + Ga) (?г + ?~min)]- D - Р max - max + ~min (Gh -f Gj) R~min ГД6 Pjnaj = R~maxlR~min- Для схемы С одним параллельно включенным резистором с проводимостью (рис. 2.3,6) шах = [1 + (/?г + Rl) (G + Gmin)]-; D - P max max (Rr + Rl) G~min Нетрудно заметить, что предельно достижимому значению D (Omax) соответствуют уСЛОВИЯ R.mln > Rr (сМ. рИС. 2.3, о) И Gmin>G (см. рис. 2.3, б). При выполнении этих условий для обеих схем рис. 2.3 справедливо соотношение вида Z)max Ртах(1-/(max). (2.4) Из соотношения (2.4) следует, что для увеличения диапазона регулирования необходимо увеличивать пределы 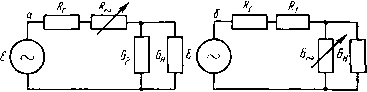 Рис. 2.3. изменения величин сопротивлений управляемого резистора и уменьшать величину Ктх, стремясь сделать ее меньше единицы. Последнее условие приводит, однако, к потере начальной передачи УЭА. Для резистивных УЭА, использующих полупроводниковые диоды, необходимо выбрать начальные смещающие токи /о или напряжения Uo и максимальные величины управляющих токов А/=1/о-1\ или напряжений AU=\Uo-U\, так чтобы полностью использовать уча- 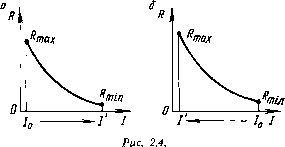 сток характеристики диода как регулируемого в УЭА элемента (см. § 1.5). На рис. 2.4 показан случай, когда начальный ток /о соответствует максимуму (а) и минимуму (б) сопротивления диода R. Напомним, что на рабочем участке (см. § 1.5)
|