
|
|
|
Главная -> Управляемый электронный аттенюатор в соответствии с формулой (2.2), табл. 2.1, 2.2 и соотношениями, приведенными в § 2.1. 3. Определение нелинейных искажений выполняется с использованием выражений (2.14) - (2.16) после расчета нелинейной передаточной характеристики в соответствии с методикой, излол<енной в § 2.2 (см. табл. 2.3- 2.7). 4. Расчет частотных характеристик УЭА осуществляется при различных величинах X (см. § 2.3). 5. Расчет влияния дестабилизирующих факторов на форму частотных характеристик тракта производится в соответствии с методикой, описанной в п. 3.1.2. 6. При невыполнении требований технического задания следует изменить структуру УЭА или выбрать другие УЭ и повторить расчет. Пример. Синтезировать резистивный УЭА, предназначенный для включения в тракт с заданной структурой (рис. 5.1) между источником сигнала /?г=50 Ом, Сг = 5 пФ и нагрузкой R= \ кОм, С = 40 пФ. Нормированная полоса пропускания тракта (на уровне 0,7) Jtrp = =(ОгрТ=(агрЯС= 18,7. Допустимое уменьшение максимального коэффициента передачи при подключении УЭА и КЦ составляет 20%, Хгр должна быть не менее 10. Легко установить, что уравнение тракта в данном случае может быть записано в виде У =аУт-go, где а = 8, go=159 мСм, с коэффициентами ат = а; bm = 0; Cm = -go; dm =-1. Найдем зависимости
Рис. 5.1. Рис. 5.2. Wi(S) для П-образного УЭА. Так как bm = 0, то начальные параметры УЭА выберем следующим образом: ао=1; *o=P/go; Со = 0; <о=1, где Р - варьируемый коэффициент. По выражениям (5.8) получим: Gi = go S (2а - А ) - 2а -Ь К 5 (Д + 4а) - 4а 0з = 8о где Д = а -Ь Р - 1. 172 2apS S (2 + До) - 2 - V (Ag + 4а) - 4а 2PS При S= 1 <3i = Gio = 0; == P/go; Оз = Озо=0. Таким образом, максимальный коэффициент передачи и полоса пропускания тракта будут уменьшаться за счет того, что между генератором и нагрузкой в исходном режиме УЭА включено сопротивление /?2o=P/go- Поэтому коэффициент р необходимо выбрать в процессе проектирования минимально возможным. Анализ выражений для Gj (S) и G3 (S) показывает, что уравнения Gj = О и G3 = О имеют по два корня: для Gj Su = 1 и S21 = - (а+1)/Р < 0; для Оз = 1 и = Пal/6. Так как a + P-l Si3= 1 и S2a=(l-ba)/p. go 9+P BO всем диапазоне регулирования -J > 0, TO проводимость Gi ; S < 00 положительна. С другой 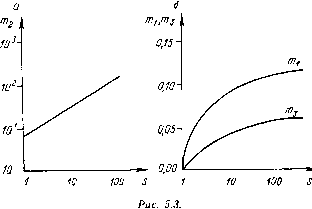 g, p-l-g jo p-9 стороны, -df- sif a + -l =-f-f+T этому проводимость G3 отрицательна в интервале 1 <S < S23, если выбрать р < 9. Таким образом, область реализуемости УЭА ограничена значением Знач = 52з = (1 +а)/р, причем нецелесообразно выбирать Р > 1 -f а = 9. Величину затухания So в исходном режиме, вносимого аттенюатором за счет сопротивления /?2o = P/go, определим из анализа схемы, показанной на рис, 5.2, по формуле (5.9): S, V+Z =l-fO,006p. Как следует из этого выражения, даже при наибольшей величине Р = 9 затухание So невелико, и его можно не учитывать. Нетрудно показать, что полоса пропускания тракта (см. рис. 5.2) при зо= = P/go=9/0,159 = 56,6 Ом составляет л;гр=10,1. Таким образом, П-об-разный резистивный УЭА, элементы которого управляются по законам: Gi = go K2(9S - 1) -4 36S 9S 9S-1 2 = -; Оз = §о- /8 (9S- 1) удовлетворяет в целом поставленной задаче. Зависимости нормированных параметров УЭ (mi = G\lga; miRiga, m3=Gzlgo) показаны на рис. 5.3, а, б. Исследуем возможность упрощения УЭА путём применения корректирующих цепей, обеспечивающих выполнение условий азаимного дополнения для случая одноэлементного УЭА. Проводимости генератора и нагрузки в тракте (см. рис. 5.1) имеют полюсы, расположенные в бесконечности, поэтому для возможности удовлетворения .условия (3.49) эти полюсы должны быть предварительно устранены путем включения дополнительных резисторов последовательно с 2г и Zb. Как показывает анализ, это приводит к значительному усложнению коррекции тракта и уменьшению его коэффициента передачи. Рассмотрим случай последовательного УЭА (см. поз. 1 в табл. 3.1), для которого необходимо выполнить условие (3.47). Выбрав коэффициенты уравнения тракта [см. формулу (5.2)] и начальные параметры УЭА [см. формулу (5.1)], на основании табл. 3.4 для включения КЦ в соответствии с поз. 3 получим систему: уХ-гоУ;, + 1 = 0; ) YX + l=k(l+YrZ ), где Yj. = Yi-\- Y,.; Z = Z-- Z- Из системы следует kRAl+rn)+kR(l+ ртг) -Го(1+рг)(1+ fnr) o r(l+pt) где x=RC; Tr=/?rCr. Проводимость Yi физически не реализуема, так как выражение для Yi[p) содержит в числителе член с отрицательным коэффициентом при р. Таким образом, рассматриваемое включение КЦ не дает возможности обеспечить условие взаимного дополнения (3.47) при той же форме АЧХ тракта. Так как, по условию задачи, допустимо изменение формы АЧХ за счет КЦ, то для устранения указанной трудности будем считать величину k частотно-зависимой, например k=ko{l+epx), где коэффициент 8 при проектировании необходимо выбрать минимально возможным. С учетом сказанного для Y получим Ор -Ь gjP -i- аР* r,RAl+m) где ao = ko{Rr + R)-rt, aikRx(l+e) + kaR(x + x,)-ro(i: + i:r); Oj = eAjT (J?rT -f- /?Tr) - ГоТТг. Как показывает анализ, варьируемые параметры ko, / о и е не удается выбрать так, чтобы удовлетворить одновременно заданным требованиям по полосе пропускания и коэффициенту передачи тракта. Так, при выборе ао=0 и 02=0 потери в коэффициенте передачи отсутствуют, однако сужение полосы пропускания оказывается недопустимо большим: 8=0,116, д;гр = 7,3. На рис. 5.4 приведена соответствующая схема тракта с последовательным УЭА и корректирующими цепями. Эта схема может быть существенно упрощена за счет отказа от применения высокоомной проводимости Vi и низкоомной составляющей корректирующего сопротивления Zj, что приведет практически лишь к коррекции импеданса Zg- Хотя такой вариант легко реализуется, он не удовлетворяет поставленным требованиям. Не удается получить приемлемое решение также и при других способах включения КЦ. В заключение рассмотрим возможность прнмемсмня диухэломс-иг-ного УЭА с постоянным входным или выходным сопротиилеппсм. В данном случае целесообразно осуществить коррекцию сонротшик--ния генератора с помощью КЦ 2, (см. рнс. 5.5). Так как генератор Ц 0,01МпГ L3 мкГ R1 50 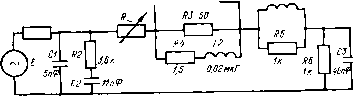 Рис. 5.4. является низкоомным, то цепь коррекции также будет низкоомной и мало повлияет на форму частотных характеристик тракта, так что необходимость применения второй КЦ в этом случае отсутствует. Параметры КЦ Zi легко определяются из условия Zr-t-Zi-T-Q, а зависимости W<(S) двухэлементного УЭА-на основании выражения 1.1 0.0125мкГ 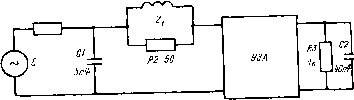 Рис. 5.5. (3.52) или (3.53). Граничная частота тракта по схеме рис. 5.5 jcrp = =20, т. е. одновременно с коррекцией выходного импеданса генератора осуществляется коррекция АЧХ. S.3. ПРОЕКТИРОВАНИЕ ЦЕПИ УПРАВЛЕНИЯ 5.3.1. Исходные данные Для проектирования цепи управления в качестве исходных данных должны быть заданы: 1) сведения об управляемой цепи (УЦ), определяемые при проектировании цепи сигнала: а) типы УЭ; б) выбранный метод управления (токовый или потенциальный); в) структура УЦ (количество звеньев, количество ветвей и способ их соединения); г) требования к управляющим элементам. При этом для каждой ветви УЦ должны быть заданы: диапазон изменения (/mm, /mas или f/min, i/max); нормальное состояние УЭ ( открыт , закрыт ); требуемая задержка включения (по / или U). Кроме того, должны быть заданы требуемые соотнощения между токами (или напряжениями) ветвей. Например, в случае двух ветвей: /i = =/2;/1/2; /i+/2 = const; Ui = U2\ Ui=U2, Ui + U2 = consi и т. д.; 2) сведения об источнике управляющего воздействия X: а) вид управляющего воздействия (напряжение переменного или постоянного тока, температура, освещенность ит. д.); б) диапазон изменения X(Xmia, Хтах); в) быстродействие; 3) требования общего характера, используемые для проектирования вспомогательных цепей (напряжения источников питания, диапазон рабочих температур и т. д.). При использовании современной элементной базы возможны два подхода к проектированию цепи управления, которые условно назовем системотехническим и схемотехническим. При системотехническом подходе используют унифицированные блоки, ориентируясь в первую очередь на универсальные микросхемы (ОУ, ДУ, стабилизаторы напряжения и т. д.). Такой подход применяют и при проектировании гибридных интегральных схем. При схемотехническом подходе используют нетиповые схемы и производится детальный расчет этих схем. Такой подход применяется и при проектировании полупроводниковых интегральных схем. Специфика этих двух подходов находит отражение, начиная с этапа эскизного проектирования. 5.3.2. ЭСКИЗНОЕ ПРОЕКТИРОВАНИЕ При эскизном проектировании производится выбор и обоснование структурной схемы цепи управления (см. рис. 4.11, а). В общем случае последовательность этого этапа такова: 1) составляется функциональная схема; 2) производится выбор управляющих элементов (соответственно ТУЭ или ПУЭ) и определяется метод управления ими (управление током или напряжением); 3) для выбранного управляющего элемента определяется диапазон изменения: Ai/y= Смутах-f/ymln (А/у = = /у max-/у mln) ; 4) определяется структура преобразователя, при этом предварительно: а) в зависимости от метода управления управляющим элементом (AUy или А/у) определяется вид преобразования АХ (в AUy или А/у); б) вычисляется AUn=f{AX) [А/п=/(АЯ)]. Характер зависимости AUniAX) [AlaiAX)] определяется заданным законом управления. При необходимости в состав преобразователя включается соответствующий преобразователь закона управления; в) определяется требуемый коэффициент передачи KuAUy/AUa (/<1 = Д/у/Д/п). Если Ku{Ki)>\, то в состав преобразователя должен быть включен усилитель постоянного тока. 5) определяется структура вспомогательных цепей. Процедуру эскизного проектирования проиллюстрируем на простейшем примере. Пусть проектируемый УЭА предназначен для системы АРУ радиоприемника, X - напряжение сигнала промежуточной частоты Um (соответственно задан диапазон изменения i/mmax. Ummin)- При проектировании цепи сигнала определены исходные данные: V3 - p-ti диоды; метод управления - токовый; УЦ содержит 1 звено и 2 ветви (УЭ1 й УЭ2); нормальное состояние УЭ1 - открыт , УЭ2 - закрыт ; диапазон изменения (/max, /mln) ДЛЯ обсих ветвей одинаков; во всем диапазоне регулирования должно соблюдаться условие /i-f/2 = const; задержка включения ветвей не предусматривается; зависимость I (X) должна быть линейной.
|
||||||||||||||||||||||||