
|
|
|
Главная -> Управляемый электронный аттенюатор Таблица 3.7 Уравнение тракта и система уравнений аттенюатора Общее решение уравнений аттенюатора обознаяения Zr = aZ ; a + ad=/S; b = boS; Co = CoS Z, = aZ + Го; a + ad= fS; b + rod = hS; c = CoS Z = aZr + Го: aa + d= fS; Гоа + Ь = hS; Y, = aY + go; aa + d = fS; g a + с = hS; 6= 60S fS-2a ±p(S) 1- 2a6 S G.,= = 60S; /5-2Т P(S) 26 S A5-2a-HS) 1- 9oS + roP(S) i?a=[7oS+roP(S)l/2a; iS-2 + P(S) giS-2+p(S) i- qoS+rom 7?a=[<?oS+CoP(S)]/2a: feS-2a-P(S) qoS + r p(S) goS-2 + P(S) 1- 26oS Й2 = 60S; 7iS-2a-P(S) G.,= 2a6 S f = ao + quia; q = f - 4a6oCo; p (S) = V<7S!>-4a / = До + arfo; Л = 60 + rodo; k = f + Vo: (7o = 2a/i - kro; <7i = 2/-A; 2 = fe* - 4aco/t; P(S) = /<7jS2-4a / = aao + do; Л = /-оОо + 6o; k = f + vo; 9o = 2a/i - йго; 7i = 2/-A: <72 = A - 4acoft; P(S) = y<?2S-4a / = До + do; л = oOo 4- Co; Qa = f- bogo; + 6ogo; <72 = <;?-4a6o/i; P(5) = K?2S*-4a Частное решение исходные данные нормированные зависимости т, (S) о= 1 0 = 2 6о = Го Со = 3/ло; do = 2 а= 1; flo=2; 60 = Го; Со= lo do=l а= 1; 0= 1; 6о = о; Со = i/z-o; do = 2 а= 1; = 2; &о = 1/о; Со = go; do= 1 = Gio = 2S-1±/S2-1 2S-1 + V S -! 13 = ОзГо = -5- 2S-1-V 2S-1 V2S2-1 S-1 + V2S ma = -7 =/252-1; 0 Щ = Gi/ = /252-1 5-1+V 2S2-1 /252-1 m2 = - =/252-1; з = GjTo = 25-1-/252-1 у 252-1 5-1+KS2-1 тз = % = ?2go = S; Сз 25-1-К52=Л графики зависимостей т. (.S) -(4) 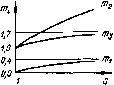 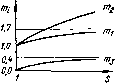 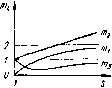 Окончание табл..7 а + od = /S; c + god = hS; b = &oS rAc+gnd)=hS; a=aS gA-Ha+b)=fS: rt,(gra+c)=hS; d=doS Л =6,5; 9o5-2+p(5) 2& S gi5-2Y-P(5) 9.5 + p{S) 2=[?.5+P(5)/2g : - VoS+pCS) do5-1 <?eS+P(5) ?2=[7oS+P(S)]/2gr; 1 0з = yS 2Y-p(5) <7eS + P(5) / = До + oo: л = <:e + ge*; 9(1 = / - *eg ; Vi = / + bflg*: 92 = 9? - 4а6,Л: p(5) =V92S-4a / = gH(b0 + л = л-(йо-1- gH-); k=a + Л; Z=aj-A; 9o=/-*; 91=/+*; 92 = / + 2/i + fc ; Y = rgH; P(5)=/ ,S f = gr (-нОв + J л = > (grOfl + e*); fe = d +A; /=d,-A; 9e=/-ft; 9i=/+ft; 9 = P + 2 + ft; Y = gr-Hl P(5)=V92S -4y a= 1; .= 1: fto=l/ge- ce = go; Y=i; 0=1; c, = 0; d,= l Y=l; 0=1; bo=I/gr: Co = 0; do=l ffi, =-= 25-1 -YS-\ 5 Щ = 2go = 5; Gj 5-1+У 52-1 = ir =-s- mi=Oi/-r= 25-1->25 -l /25 m2 = -;;=K2S -i; m, =-e- = >25 -l OTj = = V25 -1; 0з 25-1-/25 gr K2S5=:i 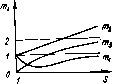 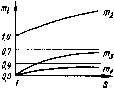 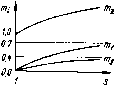 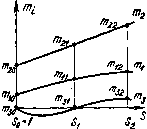 По схеме рис. 3.10 можно реализовать любой из приведенных в табл. 3.6 вариантов ступенчатого HP, в том числе и при таких значениях начальных параметров аттенюатора, когда плавное регулирование невозможно. Рассмотрим, например, случай 2г=2в (табл. 3.6,-поз. 1, а=1). Возьмем для определенности верхние знаки в формулах для расчета m\~R\lrQ и тз=Яз/го и проанализируем поведение функции тз{8). При уменьшении начальных параметров НА Со, Ьо, Со, do величина АПз в некотором интервале изменения затухания принимает отрицательные значения (см. рис. 3.11). Однако если при всех заданных дискретных значениях Sj msjO, то аттенюатор (см. рис. 3.10) может быть реализован. Начальные параметры аттенюатора целесообразно выбрать так, чтобы / 31 = 0 при 5=Si и тзо=0 при S=5o = 1. Определим Оо, bo, со, do из этих условий. Очевидно, что тзо=0 при ао=1 (см. табл. 3.1). Зададимся значениями do и Со=1/го и выразим Ьо, используя условие обратимости ad~bc=\: bQ={dQ-l)ro. С учетом сказанного на основании табл. 3.6 (поз. 1) получим: f = 1 + do; P(S)= /(5-2do + dl)S-A. Из условия = Rai/ro = О при 5 = S, т. е. (1 + do) Si - 2 - /(5-2do + do) = О, определим do: При этом Рис. 3.11. \ = -Щ; P(S)=/(S?+1)S-S?; R (S,+ 1)S-S,±/(S? + 1)S=-S? m 3 = -j- =---. (3.56) Например, при So=l, Si = 10, S2=100 no формулам (3.56), (3.54) и (3.55) получим для элементов схемы, представленной на рис. 3.10: 10 = 0,2; 20 = 0,9; Лзо = 0; 11 = 2; 21 = 0,09; 31 = 0; (3.57) = 2,09; 22 = 0,01; 32 = 0,085. Величины сопротивлений Rij можно определить, если умножить n,j на характеристическое сопротивление аттенюатора Го. Отметим интересную особенность рассматриваемого случая включения аттенюатора между одинаковыми иммитансами. Сопротивление аттенюатора Го не входит в уравнение тракта ZvZ. Это означает, что в схеме, приведенной на рис. 3.10, коммутация элементов, которые выбраны, например, в соответствии с выражениями (3.57), будет вызывать одинаковое десятикратное изменение коэффициента передачи в любом тракте. В случае плавного регулирования, когда элементы изменяются по законам (см. табл. 3.6): 11.3 = = : = СаГо = S, (3.58) регулировочная характеристика 5(/) будет оставаться одной и той же. Чтобы убедиться, что это действительно так, проанализируем коэффициент передачи схемы, показанной на рис. 3.12:  Рис. 3.12. . (3.59) Подставив соотношения (3.58) в (3.59), получим Го Z (3.60) (Vo-lW + ( o + do)roZ-f2 Из анализа выражения (3.60) можно сделать следующие выводы: 1) форма регулировочной характеристики K(t) схе-
|