
|
|
|
Главная -> Управляемый электронный аттенюатор -.(3.11) Введя в рассмотрение начальные значения цепочечных параметров аттенюатора Ло, Во, Со, Do, соответствующие S=l, из формул (3.6), (3.8) -(3.10) можно определить величины 2о, Yq, Pq и Qo. Zo=Л oZh+Во+С oZfZh -Ь DoZj. ; Yo=A6Yr+BoYrYu + Co+DoYu; Ро=/4о YrZ -Ь ВоУг Ч-CoZh + Do; Qo=Ao+BoYn+CoZr+DoZyY. Общее условие HP (3.6) -(3.10) дает возможность осуществить синтез неискажающих трактов с управляемыми аттенюаторами, а также может быть использовано для оценки деформации ЧХ реальных трактов, что рассмотрено ниже. 3.1.2. Обобщенный анализ деформаций частотных характеристик регулируемых трактов При проектировании приемно-усилительного тракта на основании общего условия HP (3.6), (3.8) -(3.10) с учетом комплекса других требований (заданной формы ЧХ, коэффициента передачи в исходном режиме, вида регулируемых элементов и др.) могут быть определены номинальные параметры элементов тракта, а также их зависимости от затухания S или управляющего воздействия t (положения органа управления, управляющего тока или напряжения). Однако фактические характеристики реального тракта отличаются от номинальных (рассчитанных) за счет действия различных факторов: разброса параметров элементов, различия в необходимых и фактических законах изменения регулируемых элементов аттенюатора, дестабилизирующего влияния окружающей среды, неидеальности принятой модели тракта и т, д. Влияние перечисленных факторов приводит к нестабильности формы ЧХ при регулировании; в этом смысле их можно назвать дестабилизирующими. В процессе проектирования приемно-усилительного тракта необходимо провести анализ влияния дестабилизирующих факторов на деформации ЧХ и определить допуски на величины элементов тракта, при которых эти деформации не будут превосходить заданные значения. Для оценки отличия фактических характеристик от номинальных, независимо от того, результатом действия какого фактора оно является, можно применять обобщенный коэффициент деформаций Л1д: где К, Ка - фактический и номинальный коэффициенты передачи. Коэффициент деформаций Мд является комплексной величиной: Модуль Мд1 коэффициента деформаций характеризует искажения формы АЧХ, а фаза фмд -ФЧХ. Отсутствию деформаций АЧХ и ФЧХ соответствуют Мд = 1 и (рмц, = 0. Рассмотрим особенности применения коэффициента деформаций для анализа нестабильности формы ЧХ регулируемого тракта. Введем общее обозначение Ei - для параметров Л] и В, (3.3), р2 - для Ла и Сз (3.3), iV - для величин Z (3.6), У (3.8), Р (3.9) и Q (3.10). Тогда с учетом равенств (3.4), (3.8) -(3.10) можно записать для Мд: где индексом н отмечены номинальные величины соответствующих параметров. Коэффициент деформаций Мд можно условно представить в виде M,=MoM, где Mo = £iBf 2нЛ/он/В12Ло определяет отличие фактических характеристик тракта от номинальных в исходном режиме (при S = l), а величина (3.12) характеризует искажения формы ЧХ в диапазоне регулирования (при S=l N = No и М=1), т. е. искажения от-считываются относительно исходного режима. Анализ Мо может быть проведен с помощью известных методов теории параметрической чувствительности (см., напри- мер, работу [17]). Здесь же основное внимание уделим исследованию коэффициента деформаций М. Затухание, вносимое аттенюатором, зависит не только от самого аттенюатора, но и от иммитансов тракта. Учитывая разброс и нестабильность параметров элементов тракта, а также неточность выполнения аттенюатора, следует допустить, что зависимость S{t) реального тракта отличается от номинальной Sa{t), при которой -5нЛон = 0. Искомую функцию S в выражении (3.12) определим с учетом следующих требований: во-первых, она должна быть вещественной (по определению) и, во-вторых, должна обращать М в единицу, если вещественно отнощение Величина Л, входящая в выражение для коэффициента передачи тракта, является дробно-рациональной функцией комплексной переменной р = а + /оз: о + iP + + пр гдеа; = а;(/); pi = pi(/). Форма ЧХ в исходном режиме зависит от положения нулей и полюсов функции No{p). В случае HP это положение не должно изменяться. В реальном же тракте, где условие HP выполняется неточно, по крайней мере общее число нулей и полюсов функции N(p) должно оставаться неизменным. Но тогда фазовые углы величин iVo = IЛо 1 й* и N = \N\е совпадают во всем диапазоне регулирования при са = О и ш= оо, т. е. отнощение 1± N e*/vo Фл/ является вещественным при ш = О и и = оо. Таким образом, если принять S = iV(o)/iVo(o) или 5 = = N(ao)/Nо(со), где индексы в круглых скобках указывают на значение частоты, при котором определяются соответствующие величины N и Ло, то найденные зависимости S(t) удовлетворяют указанным требованиям. В дальней-щем для анализа деформаций ЧХ применяется коэффициент N(0) No Ло(О) = I М IV (3.13) Отметим следующие достоинства способа оценки деформаций ЧХ с помощью коэффициента деформаций М [см. выражение (3.13)]: 1) можно анализировать деформации ЧХ любого тракта, независимо от того, учтено ли требование HP при его проектировании; 2) коэффициент деформаций М легко находится из анализа схемы прнемно-усилительного тракта. При этом по существу достаточно найти общее выражение N(p, t). Величины Af(o), Ло и No(o) получаются из путем подстановки р = Ои (или) t = t(j; 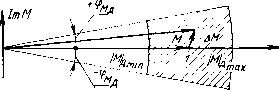 Рис. 3.2. 3) фазовый угол флт естественным образом отражает реальную картину изменения фазового сдвига сигнала при изменении управляющего воздействия t; 4) в представляющем большой практический интерес случае трактов с высокой стабильностью ЧХ появляется возможность введения ряда упрощений. Рассмотрим особенности задачи определения допусков на величины элементов тракта с учетом заданного поля допуска на коэффициент деформаций М (рис. 3.2). Частное относительное отклонение AWi/Wi i-ro элемента от своего номинального значения Wi вызывает соответствующее отклонение коэффициента деформаций М от единицы. Эти отклонения связаны между собой следующим образом [17]: где величина S,(M, И7,) = а In At д In Wi Wi дМ М dWi представляет относительную чувствительность коэффициента М к изменению i-ro элемента. Для полного отклонения справедливо соотношение где q - общее число элементов тракта и аттен-юатора. Дифференцируя М из соотношения (3.13) по Wu после преобразований получим дМ dWi N Uo I dN 1 aiV(o) 1 Wo(0) ] N dWi iVo(O) dWi r Так как в номинальном режиме (при AWi = 0) требование HP выполняется, то Л1= 1 и AM, = 5,(M, W,); m=S,iM,W,); (3.14) (M, W,) = (Л/о, W,) + (iV(o), (3.15) (Л/, ir,) = St {Now, = Wj iVo(O) dWi dN(o) . йЛ/о(0) Для упрощения нахождения функций чувствительности Si(M. Wi) все элементы схемы целесообразно разделить на три группы: элементы, входящие в состав источника сигнала (Wiv); элементы нагрузки (Win) и элемен- ты аттенюатора (Wia). Для этих трех групп в случае, например, N=Z на основании соотношения (3.5) можно получить: U7,v dZ Wir , г.. dZr . (Z, W,r) = S,(2, W,h) = 5, (Z. 1J7.,) = + + 2rZH Отметим некоторые важные свойства найденных функций чувствительности (3.15): 1) при р = 0 и любом t Si{M, Wi)=0, так как в этом случае 5.-(ЛГо(о), Wi)=Si(No, Wi) и S,(iV(0), W,) = = SdN,Wi); 2) при =/o и любом р Si(M. IF,) =0, так как SiiNo, Wi)=SiiN, Wi) и SiiNoio), Ui) =S,(A/(o), Wi): 3) если в многоэлементном неискажающем аттенюаторе (НА), все элементы которого должны изменяться сопряженно друг с другом, один из элементов Whu выбрать в качестве независимого и выразить через него остальные: W,a = 9i/i(Wfta), где ф,-- функция рассопря-жения 1-го элемента, равная единице при идеальном сопряжении, то для функций чувствительности Sk(M, Wha) и Si(M, ф) справедливы равенства: WfeaJ=0; Si(M, ф,0=5,(М, Wi). Это важное свойство позволяет определить на практике допуски на функции фi, т. е. на погрешность сопряжения элементов аттенюатора; 4) сумма относительных чувствительностей по всем q независимым элементам тракта и аттенюатора обладает свойством инвариантности: 2 5, (М, W,) = 2 (2о. W,) + 2 S, (Z(o 11,) - =1 i=i 1=1 - 2 5; (2. В,) - 2 5 (0(0), W,) = 0. (3.16) Последнее равенство справедливо, если Z рассматривается как функция активных сопротивлений Ri, индуктив-ностей Li и обратных емкостей l/Cj. Поэтому если найдена функция Si{M, Ci), то ее необходимо подставить в равенство (3.16) с обратным знаком. Свойства 1 и 2, а также равенство (3.16) используются на практике для контроля правильности определения функций чувствительности. Для нахождения связи допусков элементов с допусками на деформации АЧХ и ФЧХ целесообразно ввести In М вместо jW: В номинальном режиме (при AWi = 0) т = 0 и фл£ = 0.
|