
|
|
|
Главная -> Управляемый электронный аттенюатор тельной ветви, что способствует уменьшению НИ в тракте УЭА. Из соотношения (2.41) получаем также, что ka максимален при малых Ki2 и при /Ci2< 1 от его величины практически не зависит, при этом ЛгЗтах - J2 yUmaux- В режиме РРУ откуда для диода Характер зависимости \к т21 от приведен на рис. 2.19, I Аг2тах - jg (2.43) Из сравнения выражений (2.40) и (2.43) следует, что ггшах в параллельном регуляторе, работаюш,ем в режиме РРУ, оказывается в 4 раза меньше, чем в последовательном, причем вид зависимости Аа от /Си (D) для этих вариантов схем существенно отличается. Связь к гз с величиной Кп оказывается сложной: /ггз = (1 - Ки) (2 - гКп) Khul и имеет максимум при/Ci2 = 5/6. 3. НИ в УЭА с несколькими управляемыми резистивнми нелинейными элементами Расчет НИ в схемах сложных УЭА следует осуществлять с использованием методов, изложенных выше в пп. 2.2.1, 2.2.2. Хотя эти расчеты не вызывают принципиальных трудностей, однако они носят частный характер, т. е. относятся к конкретной структуре УЭА и характеристикам используемых нелинейных компонентов. В некоторых случаях расчеты можно упростить, получив предварительно ряд универсальных характеристик, пригодных для расчетов устройств определенного класса. Покажем это на примере класса УЭА с неизменным входным сопротивлением в диапазоне регулирования /?вх=/?о (см. п. 2.1.2). Допустим, что в рабочем диапазоне частот инерцией элементов УЭА можно пренебречь. Например, как показано в работе [И], коэффициент второго порядка ряда (2.13) можно представить в виде (2.44) где gP -нелинейный параметр второго порядка i-ro нелинейного элемента (см. табл. 2.6); л: ер, - линейный коэф-Гциент передачи от места включения i-vo нелинейного элемента УЭА до его выходных зажимов. Таблица 2.7 Схема Нормированная функция Кр Рг> нелинейности УЭА Рис. 1,6, в Рис. 1.6, г Рис. 1.6, а Рис. 1.6, е Рис. 1.6, и Рис. 1.6. к - = 4-(1-К)3(2-К); = --8 (1-К)М1 + ЗК) . 4 (1 + КГ (1 К)М1-) 16(2 -К) -gv-64 Используя предложенный в работе [Щ способ опре-. Г можно получить универсальные выражения Г2?)ТсГветств7ющие им нормированные харак Йристики коэффициентов (рис. 2.20) для различных эле- ментов ряда типовых структур УЭА (а-для схемы рис. 1.6, в; б - для схемы рис. 1.6, е; в ~ для схемы рис 1 6 г-г -для схемы рис. 1.6,к; d - для схемы рис 16 д-е - для схемы рис. 1.6, и). . \ Ra ° 15 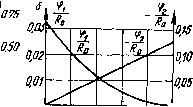 016 0.12 О.Од о 0,2 0.6 О.в 10 К 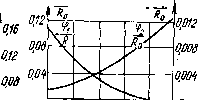 о 0Z Q.t 0,6 0,8 W К е Ъ 0,006 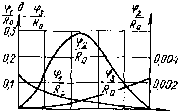 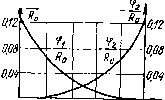 о 0,2 0.f 0.6 0,в 1,0 К О 0,2 0,4 0,6 0,д 1,0 К Рис. 2.20. Анализируя табл. 2.7 или рис. 2.20 с учетом выражения (2.44), можно оперативно оценить поведение коэффициентов нелинейной передаточной характеристики УЭА во всем диапазоне регулирования, определить неблагоприятные с точки зрения НИ области его изменения и требования к нелинейным элементам. Проиллюстрируем вышеупомянутый метод расчета МИ второго порядка на примере Г-образного УЭА с двумя нелинейными элементами в виде диодов (см. рис. 1.6, в), удовлетворяющего условию /?вх = /?о- Параметры G2: В соответствии с функциональной связью F{Vi, V2) =0 табл. 2.1 находим требуемый закон изменения: где i=Ioe . Из соотношения (2.45) можно получить fii 1 (2.45) М2) dh dui Опуская дальнейшие расчеты, приведем окончательное выражение для а): , (2.46) где знаки ± относятся к различным способам включения диодов друг относительно друга, что, естественно, влияет на взаимодействие НИ, обусловленное Gi и Ga, и, следовательно, на выходной эффект. Используя формулы (2.48) и (2.18), можно получить где А - коэффициент, практически близкий к единице (0,5-1). Из последнего выражения следует, что при малых Ki2 ггатах ~ AU gay и не зависит от D. Из сравнения kj. одноэлементных и двухэлементных УЭА следует, что искажения в последних оказываются одного порядка с искажениями в одноэлементных УЭА с параллельным нелинейным резистором (см. рис. 2.17,6). 4. НИ в УЭА на основе полевых транзисторов (ПТ) Рассмотрим НИ в наиболее употребляемых схемах УЭА, использующих регулируемую выходную проводимость ПТ: с одним (рис. 2.21, а) и двумя (рис. 2.21, s) ПТ. Эквивалентные схемы для обоих случаев приведены соответственно на рис. 2.21, б и 2.21, г. Используя метод, изложенный в п. 2.2.1 [11], составим систему уравнений для схемы рис. 2.21,6, введя на ней соответствующие обозначения и выделив из ПТ внутренний транзистор ВТ и сопротивление истока (рис. 2.22): 2+ия = 1; UR=icR; ic = f ( си, з.и), 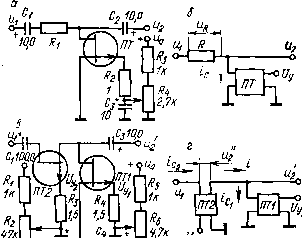 г гТ 0,0-Г Рис. 2.21. откуда подсистема первого порядка: Ки2 + K\cR = 1; Aic - 2il\u2 I подсисте1*{ы высших порядков: KiV + K\R = 0; где Y (P) - CM. в табл. 2.3 (первичные нелинейные параметры берутся из поз. 7 табл. 2.6). Опуская промежуточные расчеты, приведем окончательные выражения ча- стных коэффициентов гармоник для режимов АРУ и РРУ: для РРУ Umi e[i-f2еи(1-)] . AUo [1 + е(1-?)р е [1 + е (1-)]-е[1 + 2ел1-1)? k,2 = Рис. 2.22. (2.47) для АРУ fer2 = 4£/о е[1 + 29и(1-)] [1+6(1-1)1 tLe e [i + 9(i-g)]-e[i + 29 (i-i)p 11+в(1-Е)р (2.48) Величина коэффициента передачи схемы и v тг -пл. 1+6(1-1) Оценим динамический диапазон регулирования: (2.49) и свяжем его с максимальным коэффициентом нелинейных искажений (2.47). Из соотношений (2.47) следует, что максимум искажений при РРУ соответствует = 1п,ах. откуда, используя формулу (2.49), нетрудно получить:
|